

Method for measuring orthogonality of motion trajectory of micro-operation robot three-degree-of-freedom motion control system
A technology of motion control system and motion trajectory, which is applied in the field of orthogonality evaluation of motion trajectory and non-orthogonality correction of motion trajectory, can solve problems such as inability to guarantee three-axis orthogonality, achieve accurate positioning and ensure positioning accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
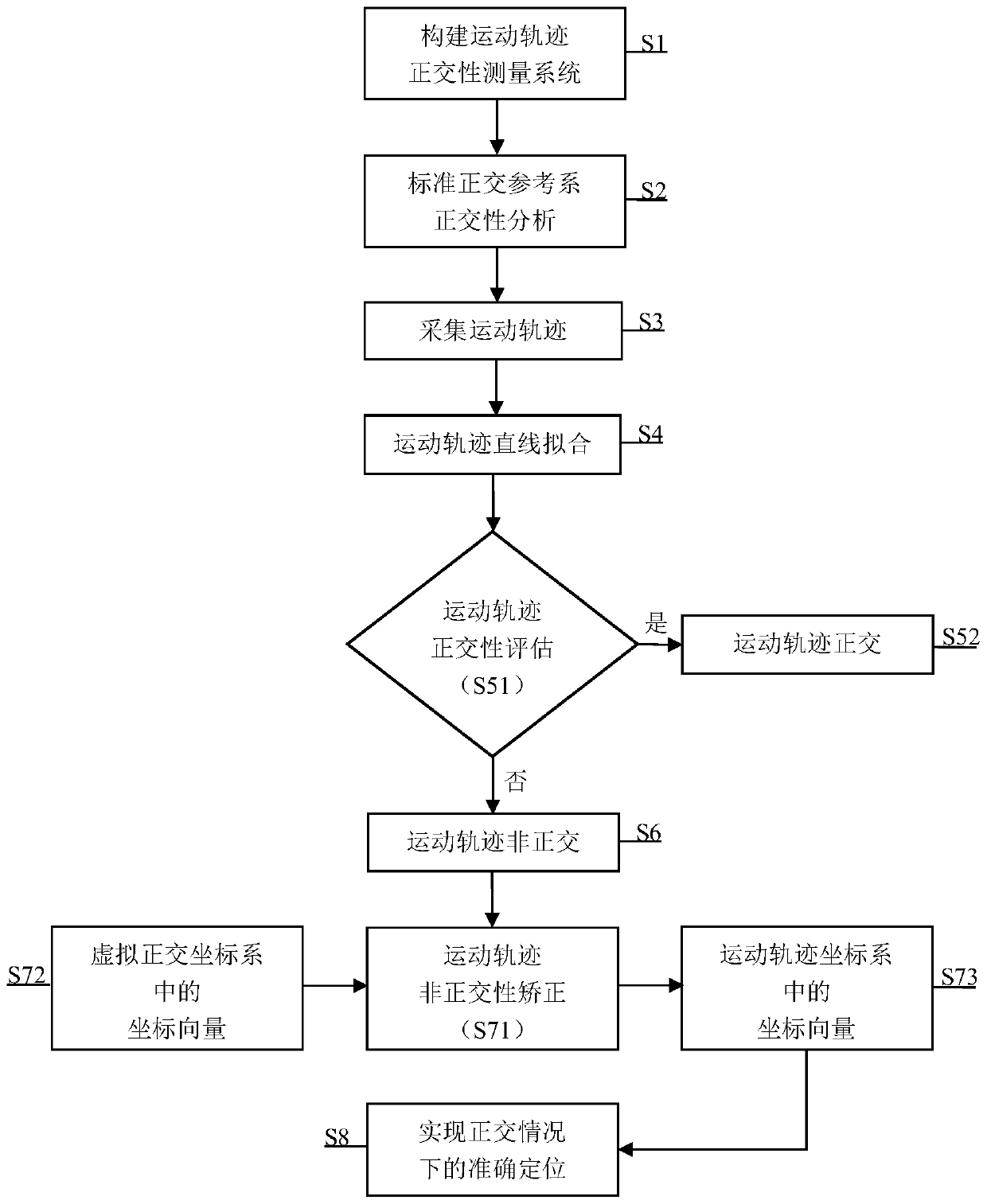
[0056] The present invention is described in further detail now in conjunction with accompanying drawing. figure 1 It is a flow chart of the method for measuring the orthogonality of the motion trajectory of the three-degree-of-freedom motion control system of the micro-manipulation robot involved in the present invention. The method for measuring the orthogonality of the motion trajectory of the three-degree-of-freedom motion control system of the micro-manipulation robot includes the following steps:
[0057] 1. Build a motion track orthogonality measurement system
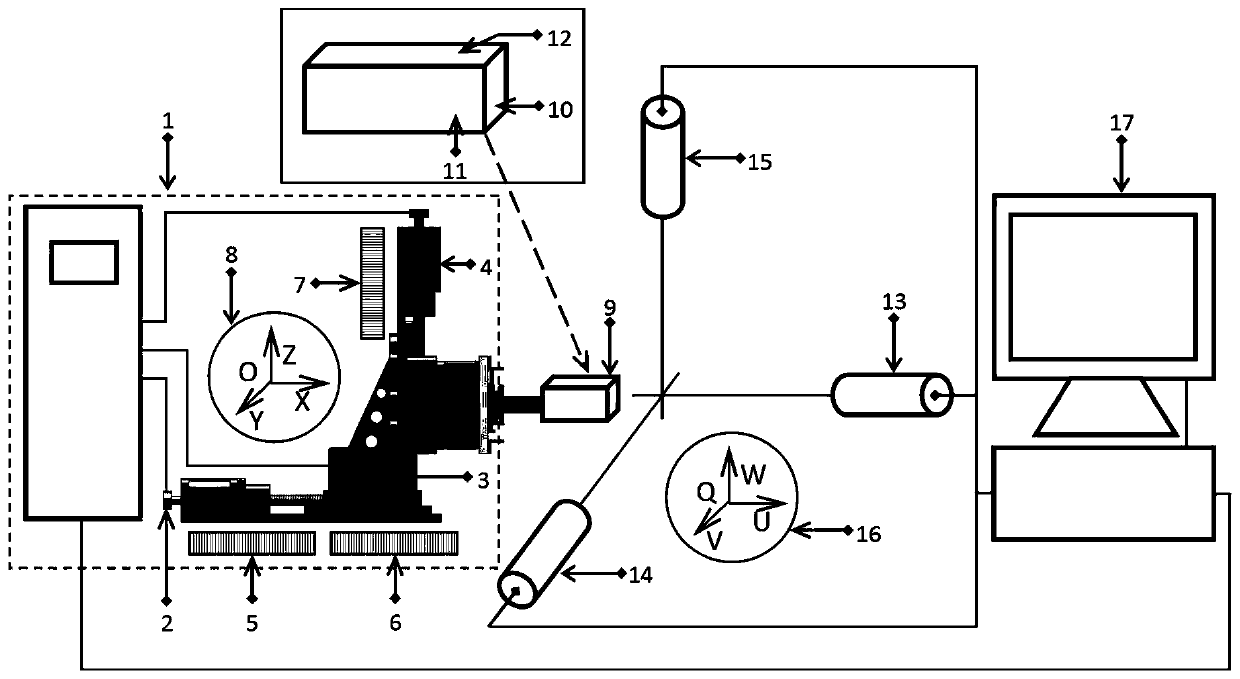
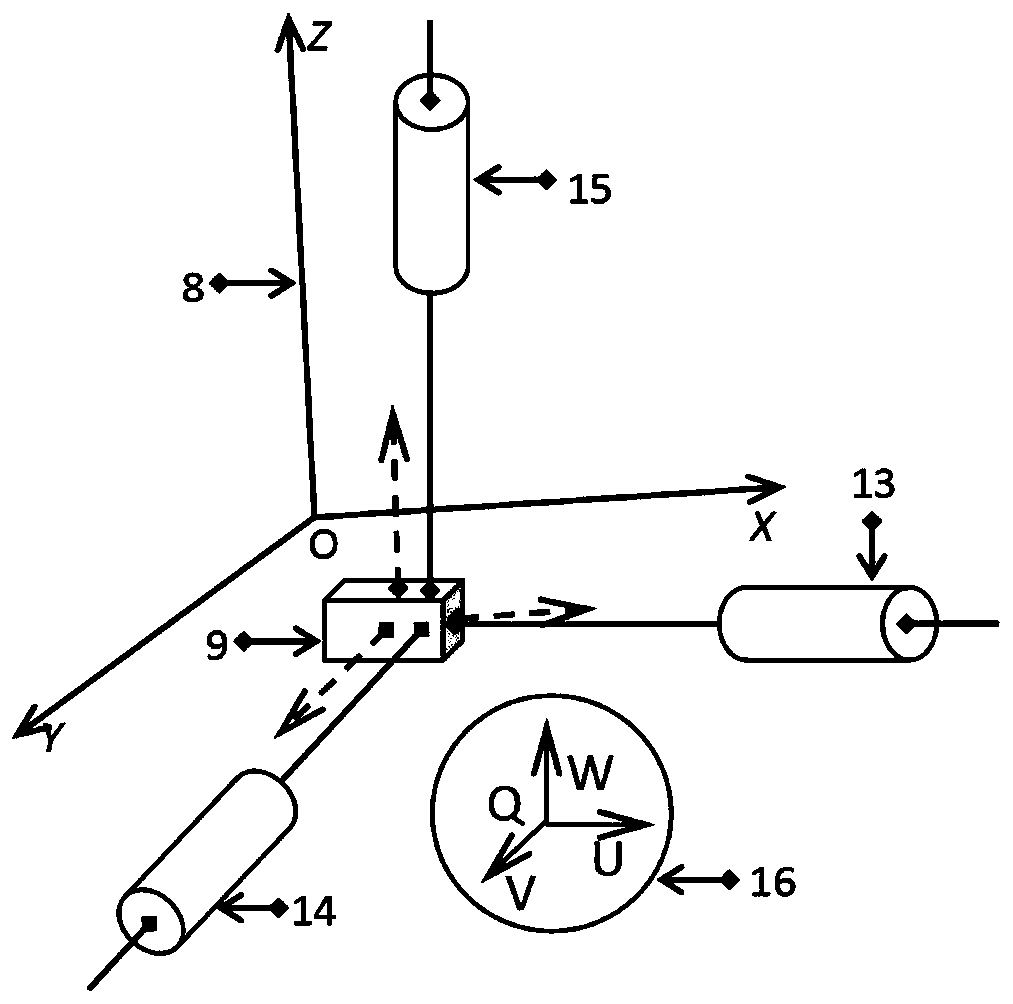
[0058] figure 2 It is a motion track orthogonality measurement system. The three motion degrees of freedom of motion control system 1 correspond to X motion axis 2, Y motion axis 3 and Z motion axis 4 respectively, and X motion axis grating scales are installed on the three motion axes 5. Y motion axis grating ruler 6 and Z motion axis grating ruler 7, with a resolution of 0.1 microns, are used for closed-loop...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More