

Full closed-loop control method for multi-shaft linked dynamic correction of interpolation positions
A dynamic correction, multi-axis linkage technology, applied in the general control system, program control, computer control and other directions, can solve the problems of reducing the service life of the machine tool, affecting the machining accuracy of the workpiece, and the machining speed is not stable, so as to improve the machining accuracy, dynamic Good stability and stable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
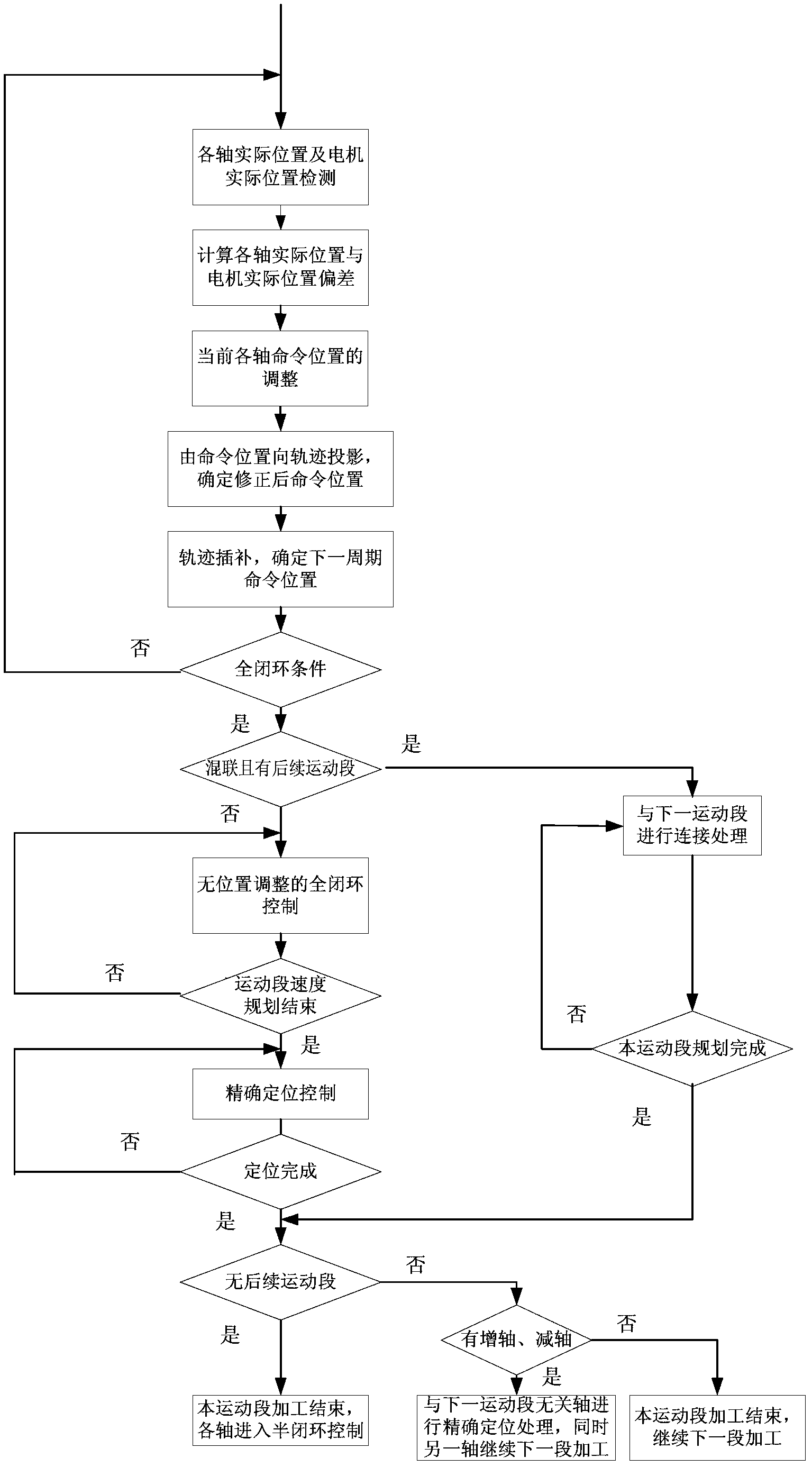
[0050] The full-closed-loop motion control of multi-axis linkage dynamic correction includes: 1) Adjust the command position of each axis according to the deviation between the collected actual position of each axis and the actual position of the motor; 2) Map the adjusted command position of each axis into a trajectory command position on the .
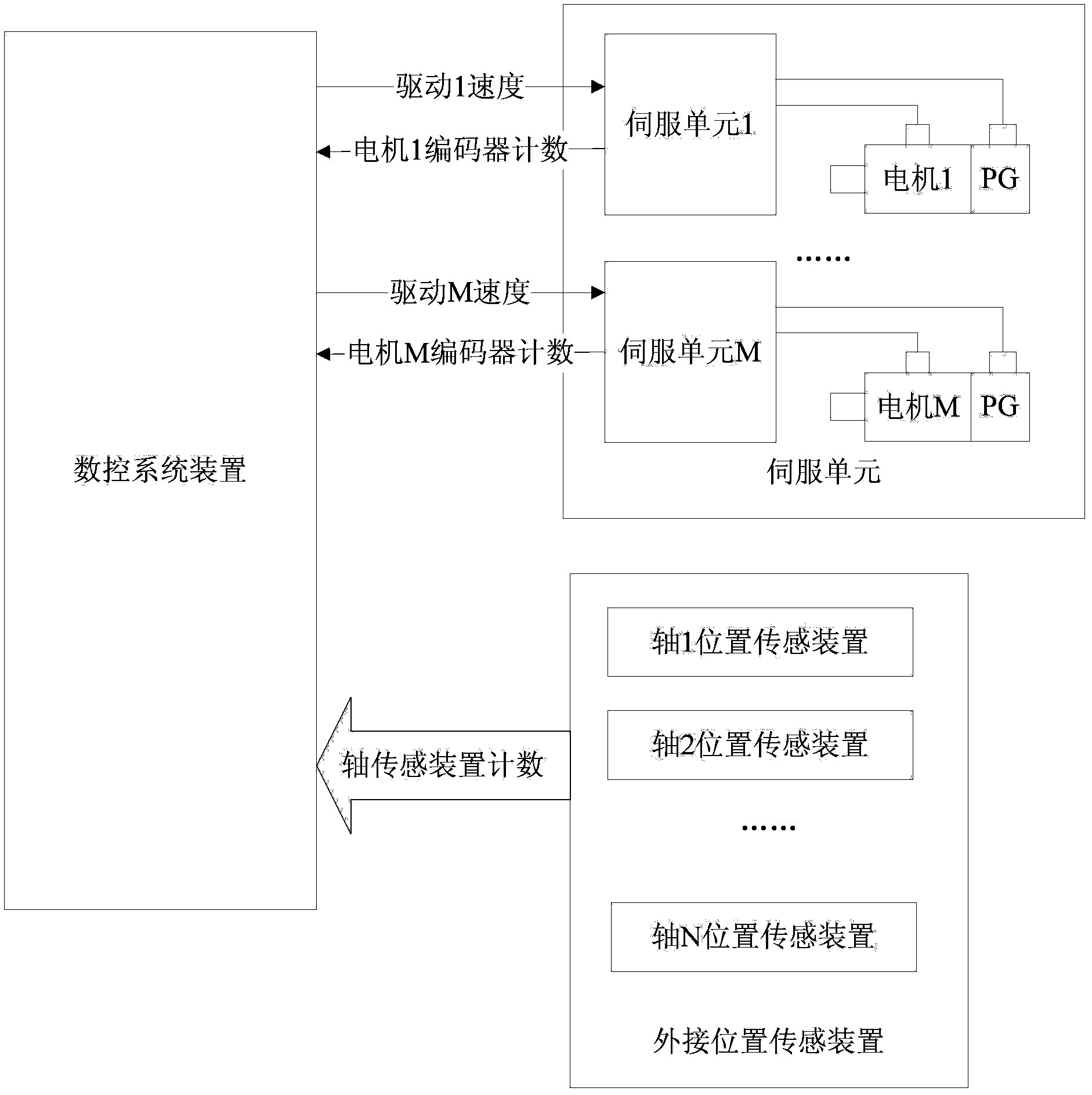
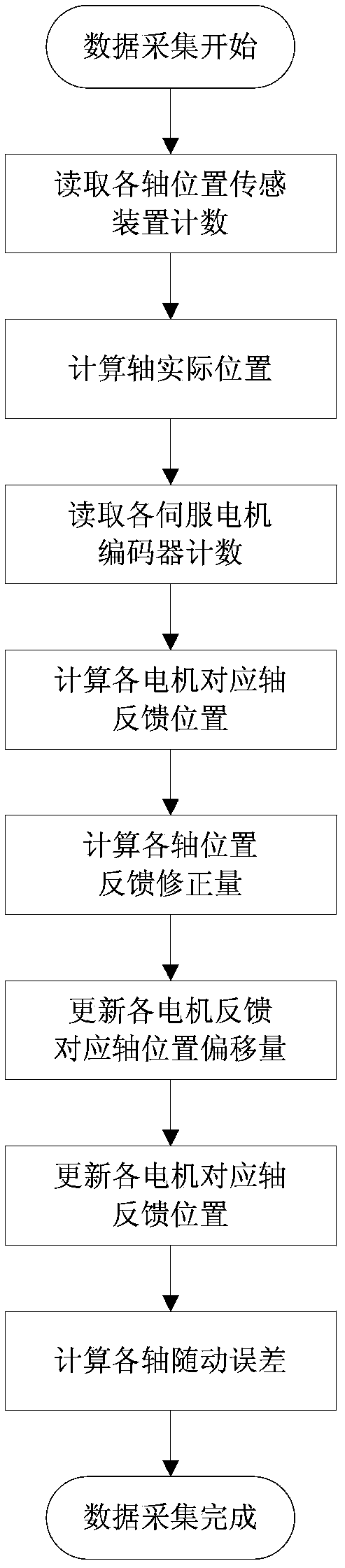
[0051]Among them, the data acquisition and deviation calculation are realized based on the double feedback method of motor and machine tool position. Breaking the concept of traditional motion trajectory planning, the axis feedback position obtained by the external position sensing device such as the grating scale at the final execution end of the machine tool axis, and the axis feedback position calculated by the feedback of the servo motor encoder, the difference between the two is the axis motion ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More