

A robot walking and bouncing mechanism
A robot and reversing mechanism technology, applied in the field of robots, can solve problems such as high friction, low transmission efficiency, damage, etc., and achieve the effects of buffering impact, simplifying structure, and strong bounce
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
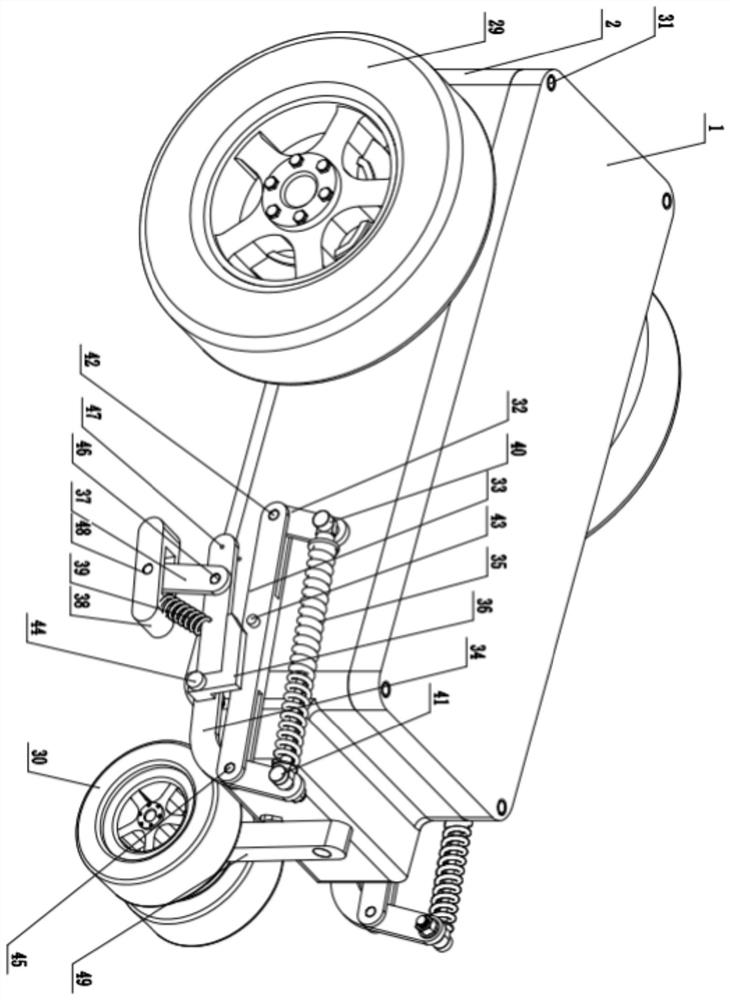
[0023] Such as figure 1 Shown, the embodiment of walking and bouncing mechanism of the robot of the present invention comprises the square cabinet (robot body) that is formed by being connected with bolt 31 by casing 2 and case lid 1, has mutually symmetrical Driving wheel 29, the rear end of casing has a pair of driven wheels 30 installed by support rod 49, the diameter of driven wheel is less than driving wheel, and connecting rod mechanism is arranged on casing both sides walls.
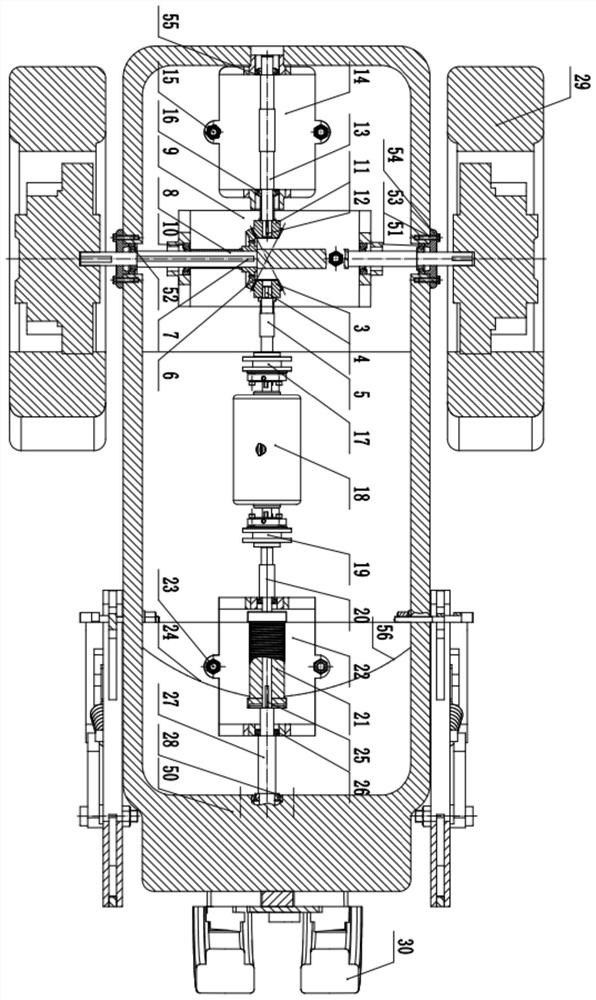
[0024] Such as figure 2 As shown, a double output shaft motor 18 is installed in the box, and the front shaft of the double output shaft motor passes through the front friction disc clutch 1), the first bevel gear shaft 5 and the flat key 4 and the first cones engaged by two. The two-way bevel gear reversing mechanism composed of the gear 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More