

System and method for cooperative target positioning of multiple unmanned aerial vehicles
A target positioning and multi-UAV technology, applied in the field of multi-UAV cooperative ground fixed/moving target positioning based on laser ranging, can solve the problems of poor real-time target positioning, decreased target positioning accuracy, and lack of operability , achieve the effect of fast target positioning speed, high target positioning accuracy, and improved rapidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0070] In the first embodiment of the present invention, a multi-UAV cooperative target positioning method based on laser ranging is aimed at the positioning of fixed targets on the ground, such as figure 2 shown, including the following specific steps:
[0071] The first step: if figure 2 As shown in Figure 10, one of the three UAVs searches for a fixed target on the ground. Once the UAV searches and recognizes the target, it immediately notifies the other two nearby UAVs to coordinate the target. Implement targeting.
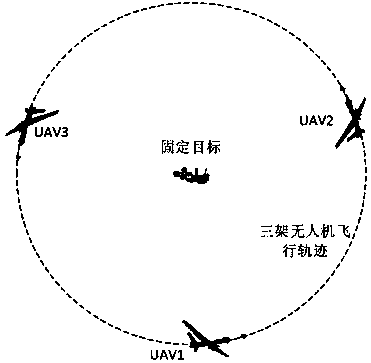
[0072] The second step: if figure 2 As shown in Figure 11, the three UAVs keep flying around the target, and their top view is as follows image 3 As shown in , the tracks of the three UAVs basically form a circle;
[0073] Step 3: If figure 2 While the three UAVs shown in 12, 13 and 14 are flying around the target, the airborne main control board completes the detection and identification of the target, and calculates the corresponding gimbal control...
no. 2 example
[0078] In the second embodiment of the present invention, a target positioning method based on multi-UAV cooperative ranging is aimed at the positioning of ground moving targets, such as Figure 4 shown. The difference between the second embodiment of the present invention and the first embodiment is that Figure 4 In 19 and 20, the specific steps are as follows:
[0079] The first step: if Figure 4 As shown in Figure 10, one of the three drones searches for a moving target on the ground. Once the drone searches and recognizes the target, it immediately notifies the other two nearby drones to coordinate the target Implement targeting.
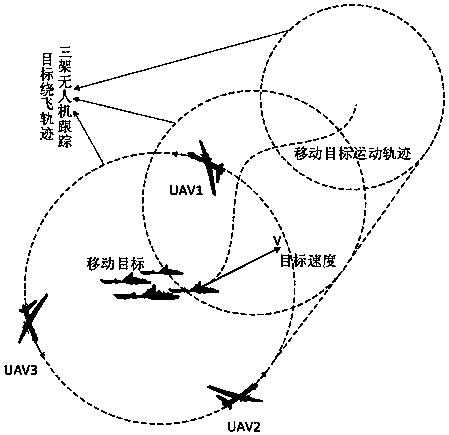
[0080] The second step: if Figure 4 As shown in Figure 19, the three UAVs keep flying around the target. Since the target is a moving target, the three UAVs need to track and fly around the target. The top view of the flight path is as follows Figure 5 shown;
[0081] Step 3: If Figure 4 As shown in 12, 13 and 14, while the three UAV...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More