

Immobilization method of a wearable wheel type immobilization force feedback control device
A control device and stop force technology, which is applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve the problems of destroying the execution of objects to be executed, and the failure to reach the required value, so as to improve the sense of immersion on the spot, responsiveness, and improve The effect of movement accuracy and real-time degree
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] A specific embodiment of the present invention discloses a stop method of a wearable wheel-type stop force feedback control device, which is characterized in that it includes the following steps:
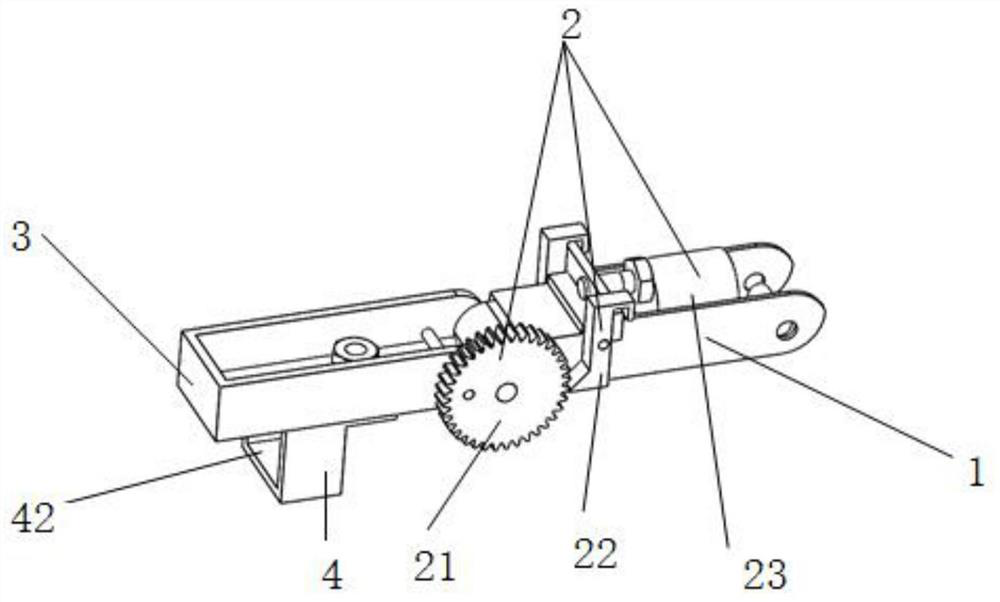
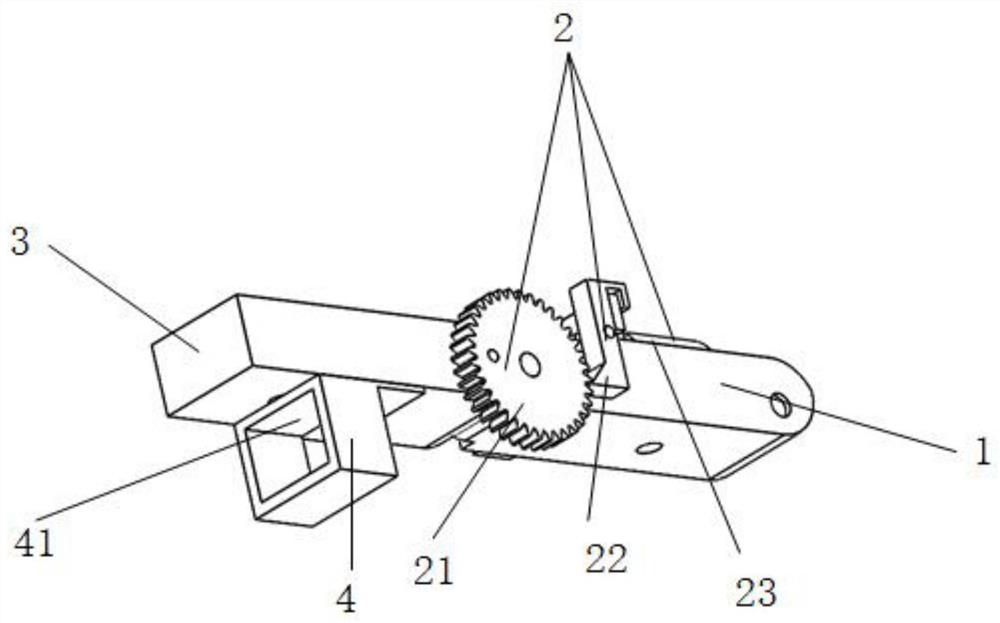
[0041] S1: When the action execution device touches the object to be executed, the control device 13 sends a locking command to the wheel stop mechanism 2;
[0042] S2: The pusher 23 drives the stop push rod 22 to contact the stop wheel 21 to lock the stop wheel 21;
[0043] S3: the stop wheel 21 is fixed to the rotating joint, and when the stop wheel 21 is locked, the joint stops synchronously;
[0044] S4: The action joints of the force feedback control device are locked, and the action execution device stops at the same time.
[0045] Specifically, in step S1, pressure sensors are provided on both the action executing device and the force feedback control device; the control device 13 of the force feedback control device outputs an unlocking signal to the pusher 23 accord...
Embodiment 2
[0102] This embodiment provides a wheel-type stop force feedback control system, which includes a wearable wheel-type stop force feedback control glove and an action execution device manipulator.
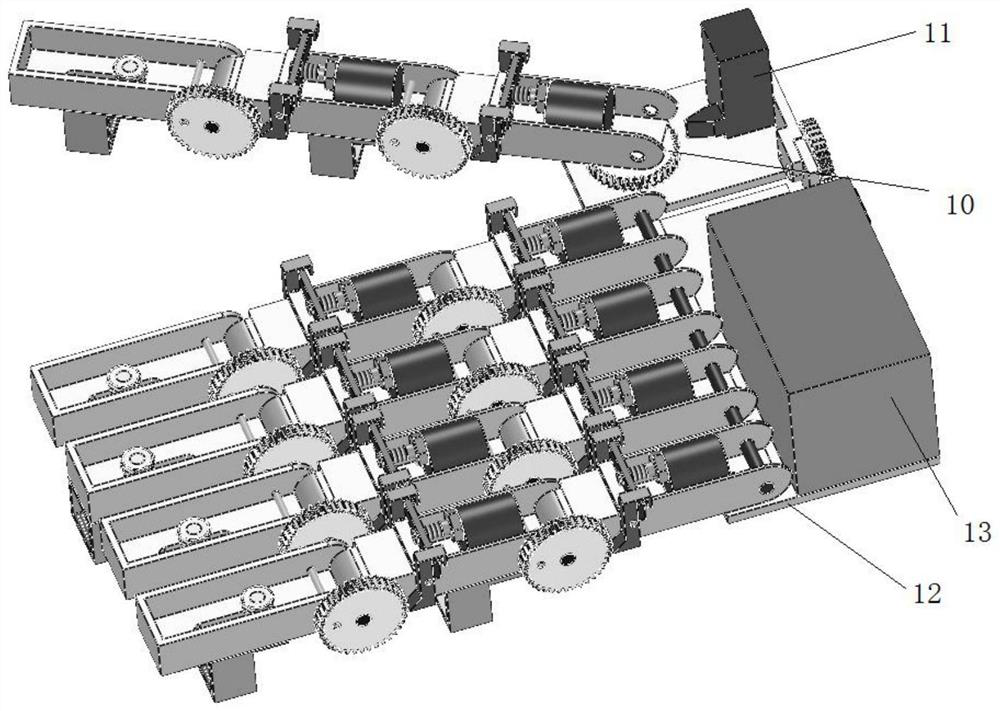
[0103] like image 3 As shown in , the wearable wheeled stop force feedback control glove is used as the control end of the force feedback control system.
[0104] Specifically, the wearable wheeled stop force feedback control glove includes: mounting base 12, control device 13 and five force feedback finger joints.
[0105] Specifically, each force feedback finger joint is hinged in series with two wheel-type stop force feedback joints, that is, it includes three joints connected in series, has two rotation centers, and a wheel-type stopper is set at each rotation position. institution, see image 3 .
[0106] Each wheel-type brake force feedback joint includes two joint parts. After the two wheel-type brake force feedback joints are connected in series, the follower rod 3 of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More