

Vehicle positioning method and device based on image sensing
A vehicle positioning and image technology, applied in the field of image processing, can solve the problems of large errors in the global positioning system and the inability to meet the needs of vehicle positioning accuracy, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
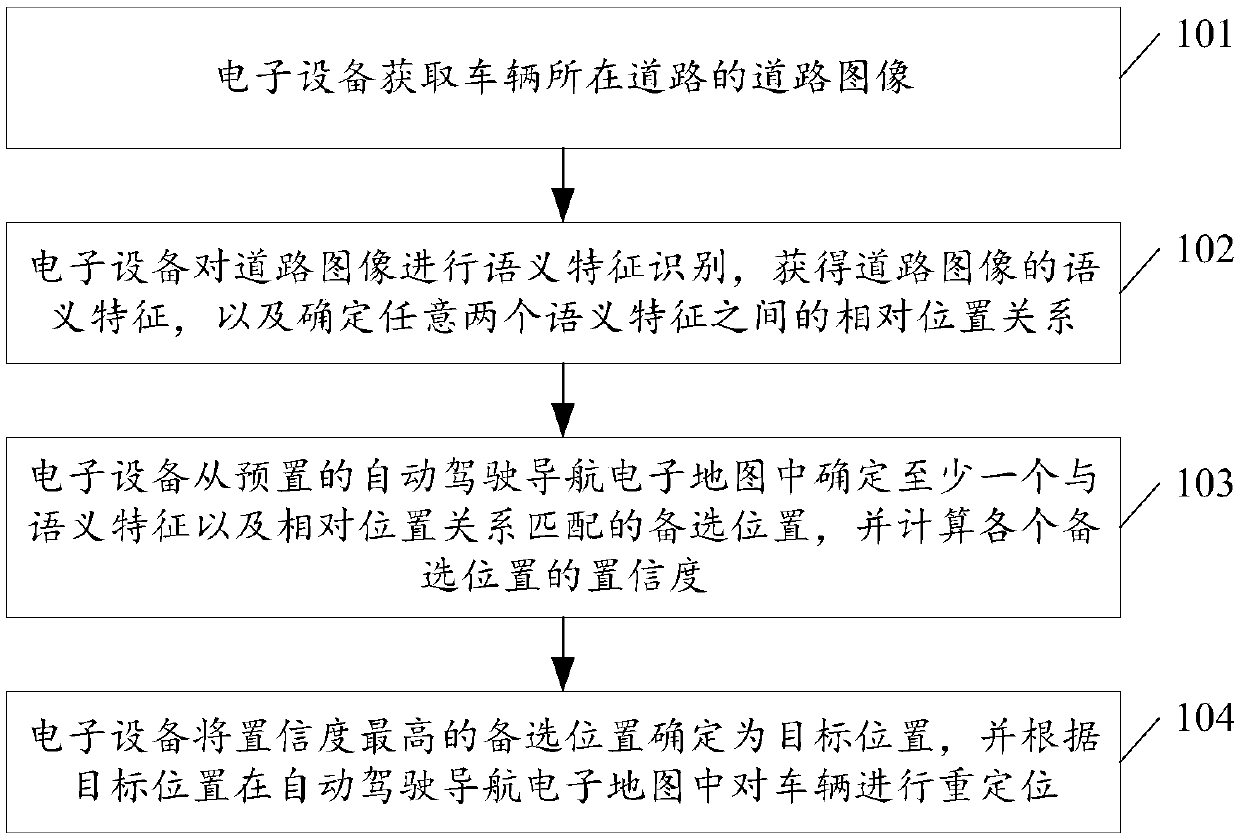
[0083] see figure 1 , figure 1 It is a schematic flowchart of an image perception-based vehicle positioning method disclosed in an embodiment of the present invention. Such as figure 1 As shown, the vehicle positioning method based on image perception may include the following steps:
[0084] 101. The electronic device acquires a road image of the road where the vehicle is located.
[0085] In the embodiment of the present invention, the electronic device may be an on-board computer or a driving computer built in the vehicle. The electronic device can control several terminal devices installed on the vehicle. For example, the electronic device can control the camera installed on the vehicle to obtain images, and can also control the large screen of the central control or the instrument panel to output information. Information such as the current driving speed, the current driving direction, and the current acceleration are not limited in this embodiment of the present inve...
Embodiment 2
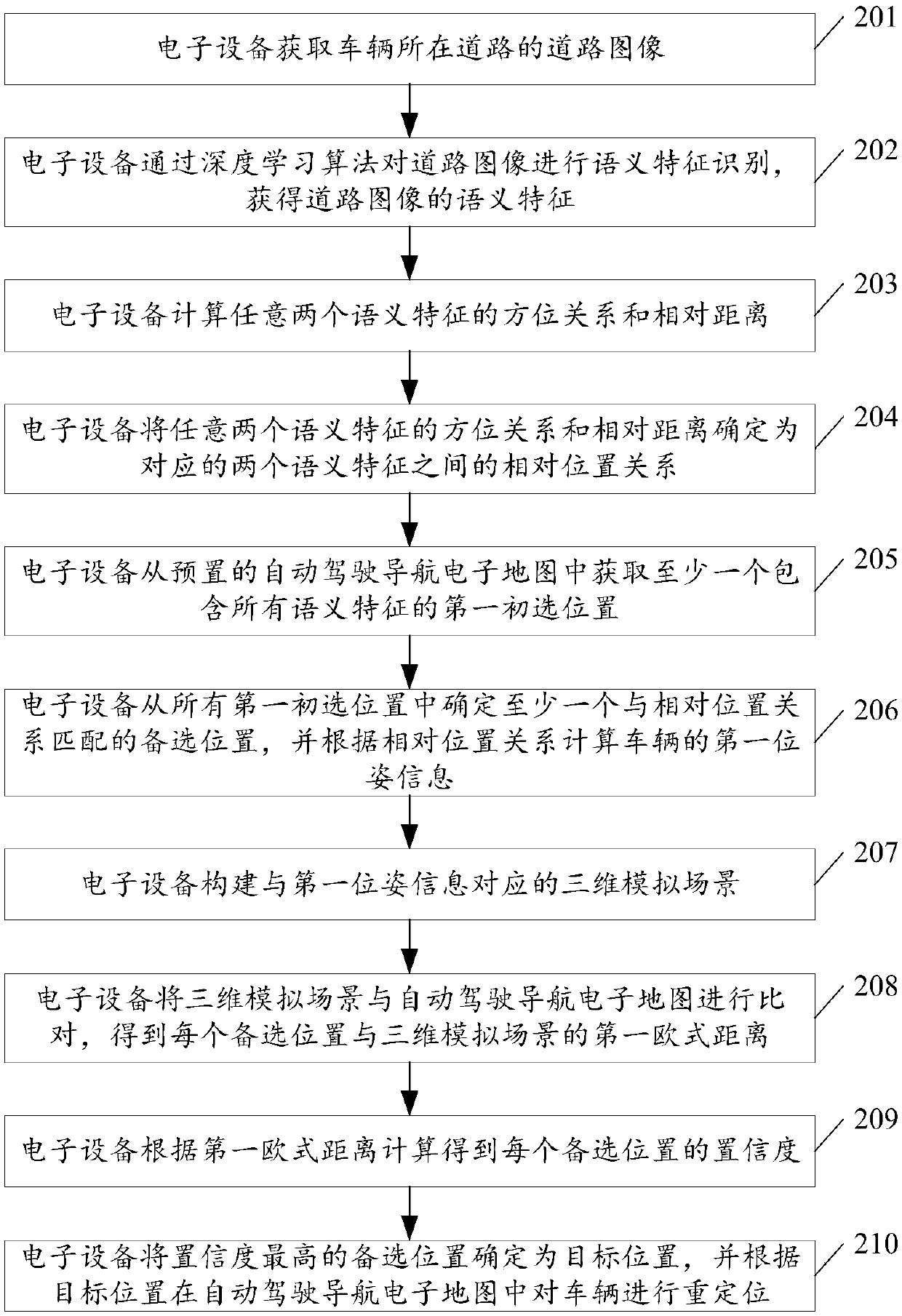
[0107] see figure 2 , figure 2 It is a schematic flowchart of another image perception-based vehicle positioning method disclosed in the embodiment of the present invention. Such as figure 2 As shown, the vehicle positioning method based on image perception may include the following steps:
[0108] 201. The electronic device acquires a road image of the road where the vehicle is located.
[0109] 202. The electronic device performs semantic feature recognition on the road image through a deep learning algorithm, and obtains the semantic feature of the road image.
[0110] In the embodiment of the present invention, deep learning (Deep Learning) is a method based on data representation learning in machine learning. Electronic devices can use deep learning algorithms to identify several semantic features contained in road images. For example, electronic devices can identify Semantic features such as buildings, lane lines, and signal lights contained in road images.
[01...
Embodiment 3
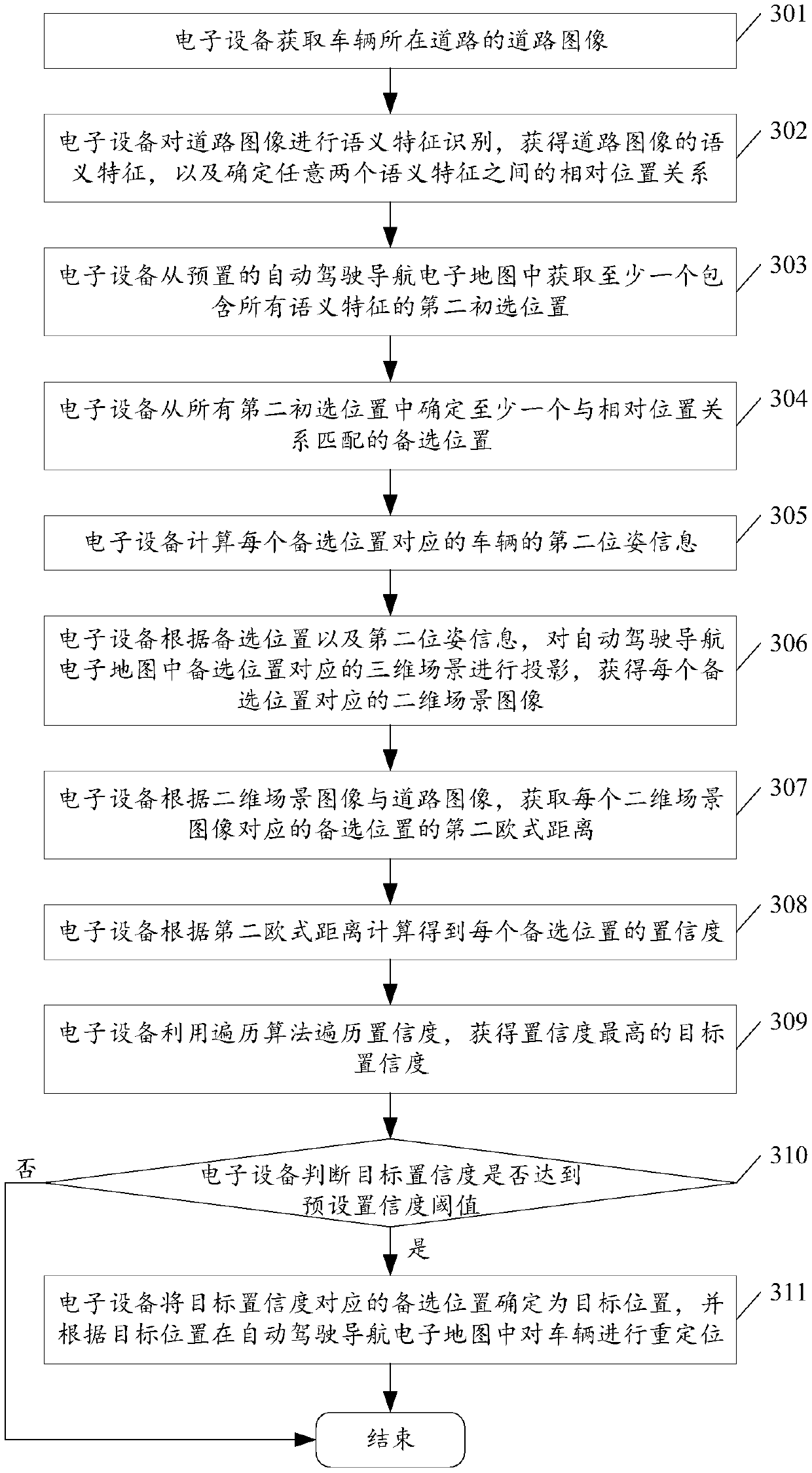
[0132] see image 3 , image 3 It is a schematic flowchart of another image perception-based vehicle positioning method disclosed in the embodiment of the present invention. Such as image 3 As shown, the vehicle positioning method based on image perception may include the following steps:
[0133] 301. The electronic device acquires a road image of the road where the vehicle is located.
[0134] 302. The electronic device performs semantic feature recognition on the road image, obtains the semantic features of the road image, and determines a relative positional relationship between any two semantic features.
[0135] 303. The electronic device obtains at least one second primary location including all semantic features from the preset automatic driving navigation electronic map.
[0136] In the embodiment of the present invention, the second preliminary selection position contains objects corresponding to each semantic feature in the road image, and the number of each se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More