

Electric turning system of ship propeller, ship propeller and ship and boat
A technology of electric steering system and thruster, which is applied in ship propulsion, rudder steering, propulsion components, etc. It can solve the problems of inconvenient installation and maintenance, complicated operation, complex structure, etc., and achieve compact structure, flexible installation position and simple installation quick effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the technical problems, technical solutions and beneficial effects solved by the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
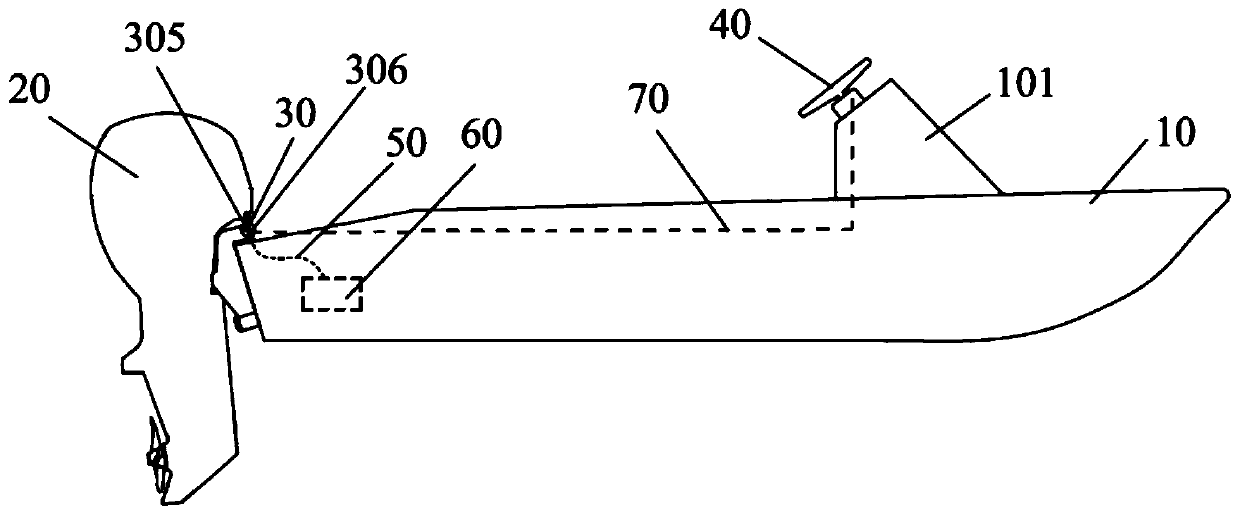
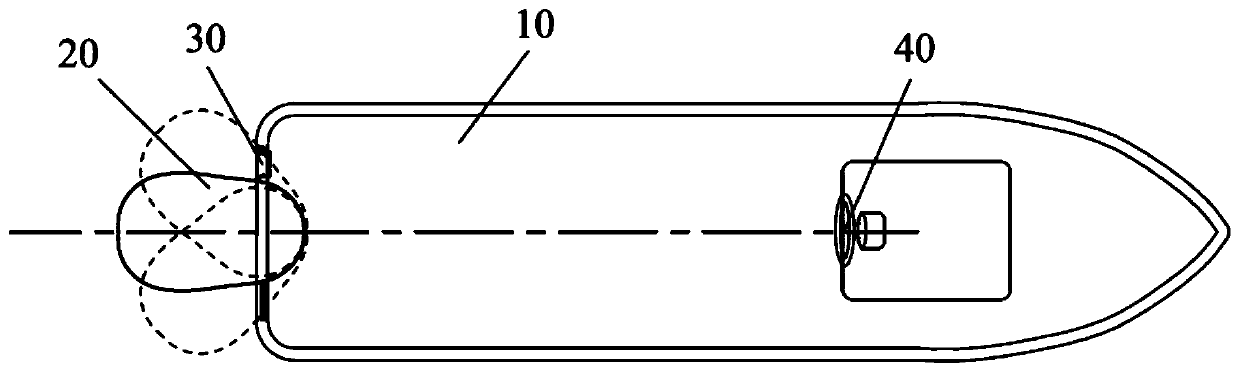
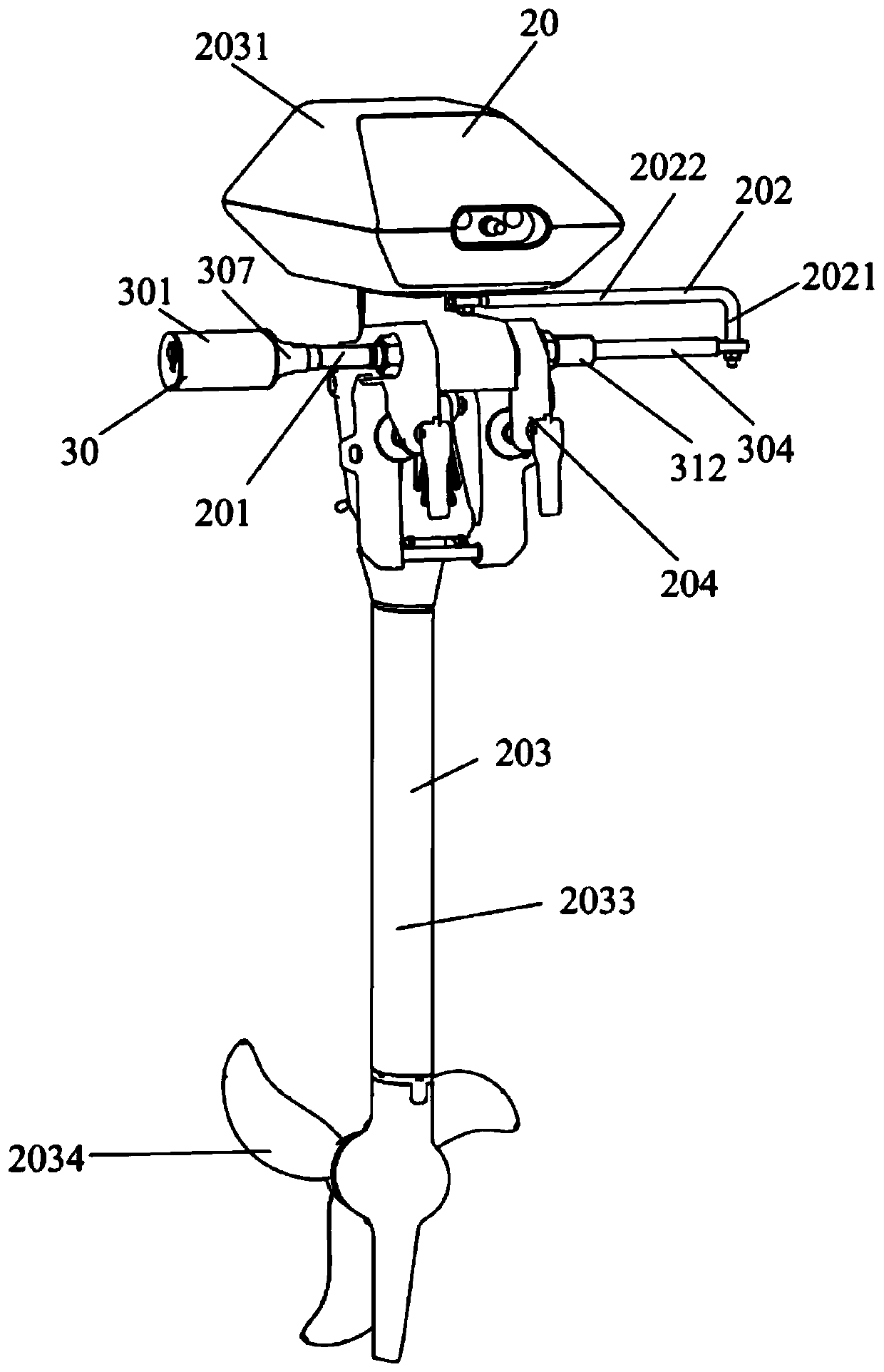
[0041] Such as Figure 1 to Figure 5 As shown, the embodiment of the present invention provides a boat, including a hull 10, a marine propeller 20, and a marine propeller electric steering system. The marine propeller 20 includes a fixed assembly, a connecting rod 202, and a rotating assembly 203. The fixed assembly and the The hull 10 is fixedly connected, and the rotating assembly 203 is connected with the fixed assembly and can rotate along a vertical axis relative to the fixed assembly.
[0042] The marine propeller electric steering system includes an electric stee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More