

Path planning method of double-mechanical-arm collaborative assembly operation
A dual manipulator, path planning technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low path quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings.
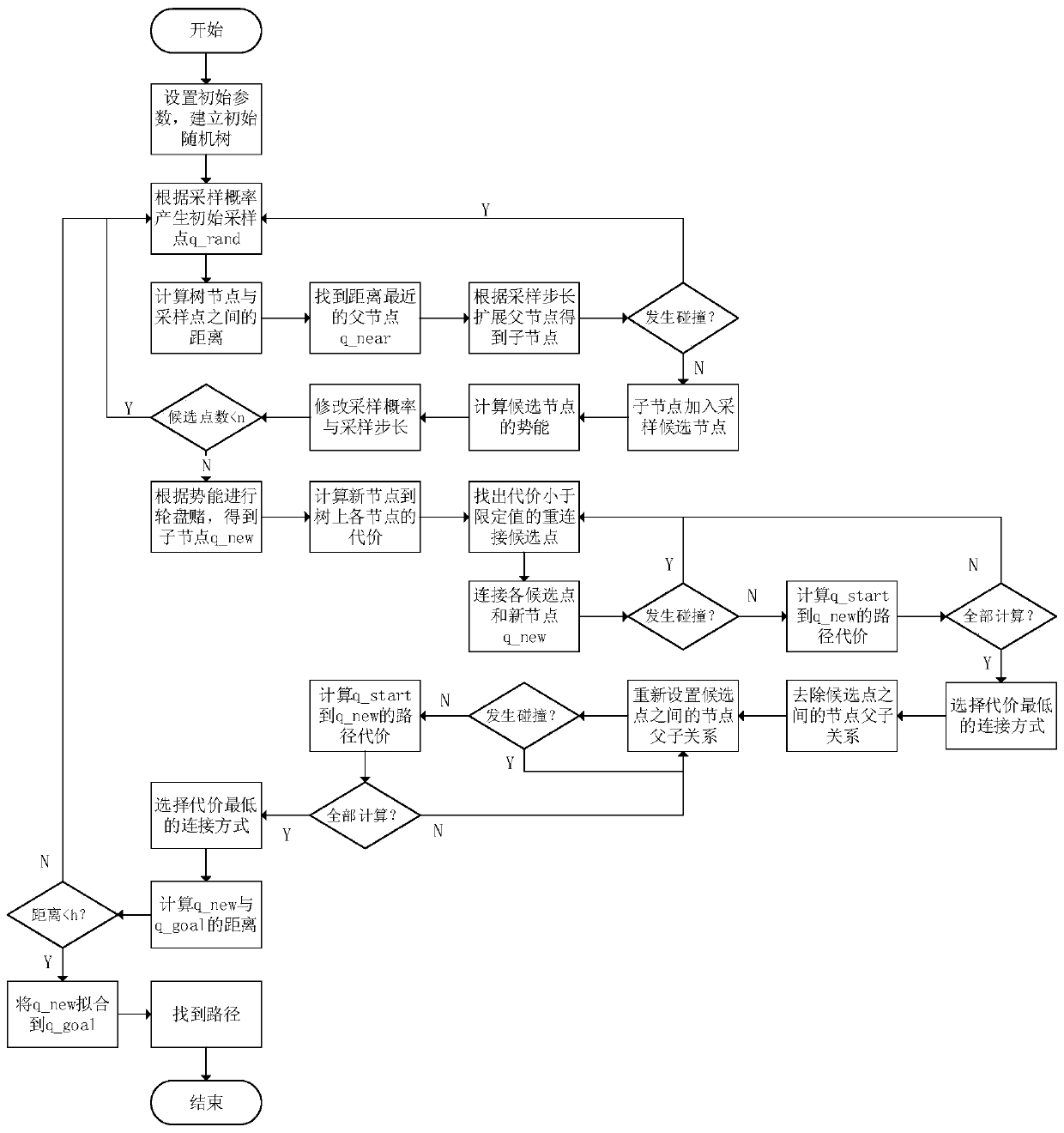
[0052] refer to figure 1 and figure 2 , a method for planning a dual robotic arm collaborative assembly operation, the method comprising the following steps:
[0053] Step 1: Establish the kinematics model and dynamics model of the dual-manipulator operation:
[0054]
[0055]
[0056]
[0057]
[0058]
[0059]
[0060] In the formula: Q is the joint position, is the coordinates of the i-th joint of the manipulator m in the basic coordinate system, is the coordinates of the i-th joint of the manipulator m in the base coordinate system of the manipulator m, P m is the transformation matrix from the base coordinate system of the manipulator m to the base coordinate system, R i is the pose matrix of joint i, T Hi is the transformation matrix from joint i to base coordinates, A i is the coordinate system conversion matrix of joint i and joint i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More