

Self-adaptive non-trace kalman filtering method of GPS and BDS dual-mode satellite navigation system
An unscented Kalman, navigation system technology, applied in the filtering field of satellite navigation system, can solve the problems of difficult calculation, linear error, reduce model accuracy, etc., to avoid deception interference, reduce error rate, and reduce switching frequency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be described in more detail below in conjunction with the drawings and embodiments.
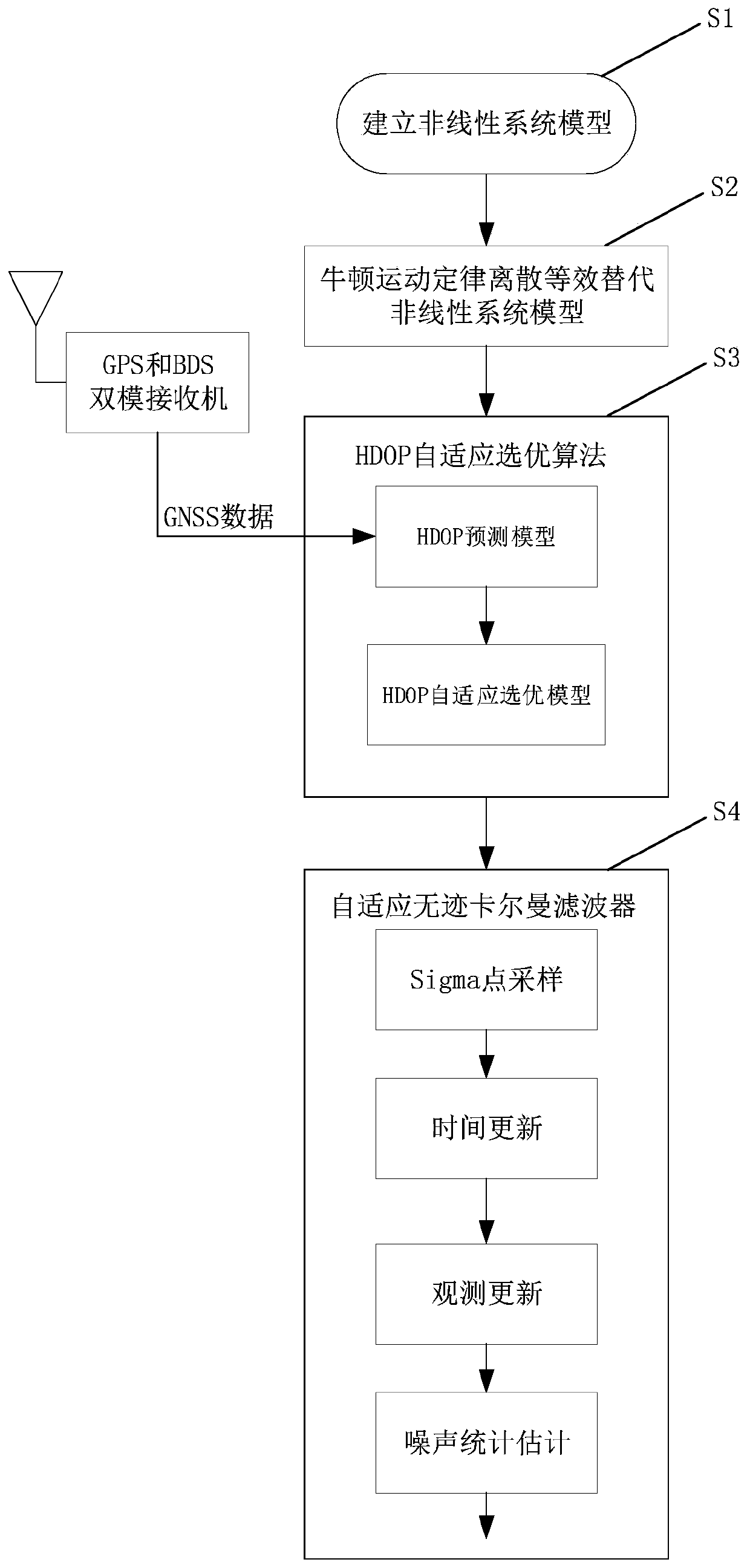
[0056] The invention discloses an adaptive untracked Kalman filtering method for GPS and BDS dual-mode satellite navigation systems, please refer to figure 1 , The method includes:
[0057] Step S1, establish a nonlinear system model. Set the model of the nonlinear system as:
[0058]
[0059] Where x k Is the state vector at time k, z k Is the observation vector at time k, f k (·) and h k (·) are the state function and observation function of the nonlinear system, w k And v k It is Gaussian white noise that is not correlated with each other, and the mean and covariance matrix of the two satisfy:
[0060]
[0061] In the formula, q is the average value of state noise, r is the average value of observed noise;
[0062] Since land vehicles can be roughly regarded as a two-dimensional plane of motion carrier, the motion on the two-dimensional plane can be decomposed int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More