

Bionic quadruped robot based on flexible spine technology
A quadruped robot and robot technology, applied in the field of robotics, can solve problems such as difficulty in realizing the running speed, redundant control, and easy instability of quadruped robots, so as to improve utilization efficiency and running speed, reduce contact force and energy loss, Reduce the effect of motion instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
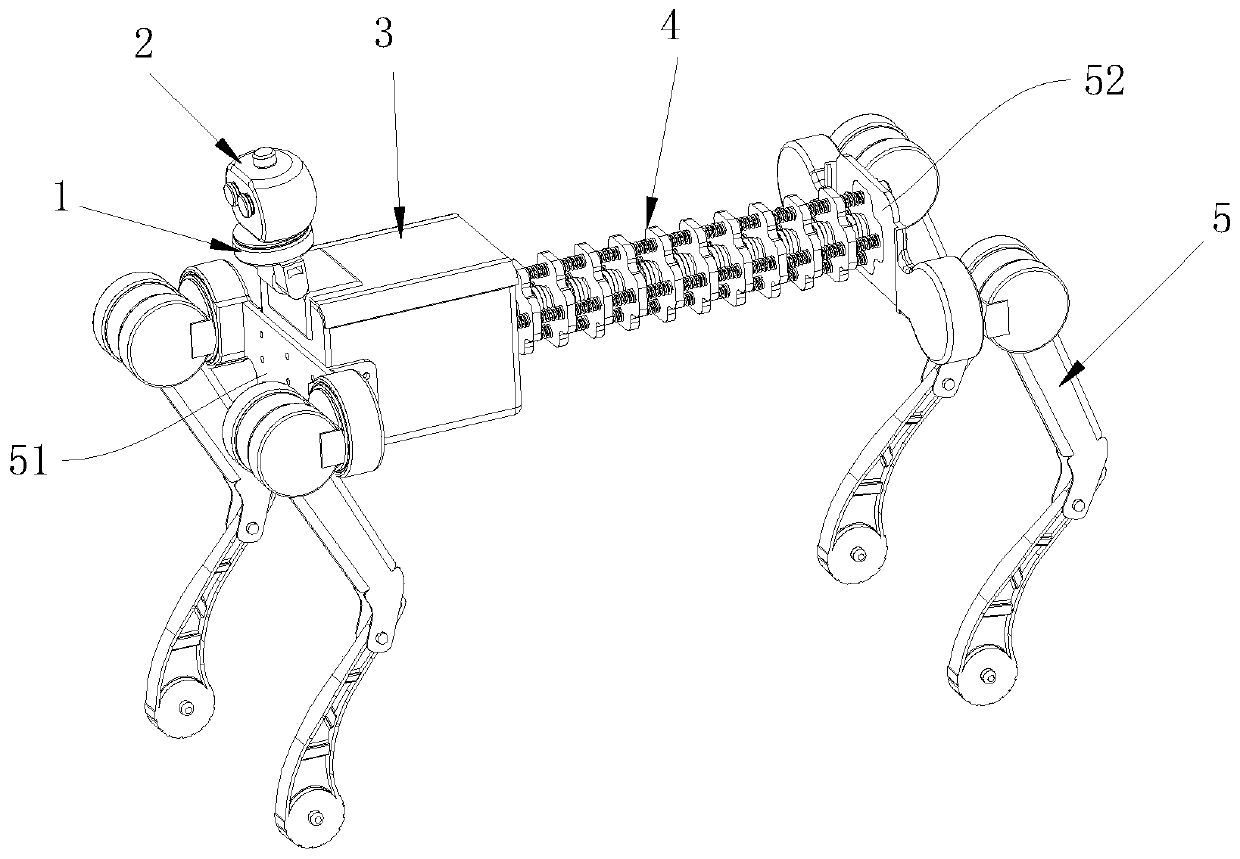
[0042] Such as figure 1 As shown, a bionic quadruped robot based on flexible spine technology includes a flexible spine 4, a head environment perception module 2, a robot control and communication module 3 and four legs 5, and the robot control and communication module 3 is arranged on the flexible spine 4 The head end of the head environment perception module 2 is set on the robot control and communication module 3, the head end of the flexible spine 4 is connected to the rear of the robot control and communication module 3, and the front of the robot control and communication module 3 is connected to a front leg fixing plate Frame 51, the tail end of flexible spine 4 is provided with rear leg fixed plate frame 52, and four supporting legs 5 are all provided with two on front leg fixed plate frame 51 and rear leg fixed plate frame 52, the head end of flexible spine 4, The middle part and the tail end are all equipped with electronic gyroscope 45 (not fully shown in the accomp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More