

Road surface construction robot environment perception system and method based on multi-source sensor
A source sensor and environment perception technology, applied in the field of artificial intelligence, can solve problems such as inability to meet high real-time requirements, and achieve good application prospects, high detection accuracy, and high real-time requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
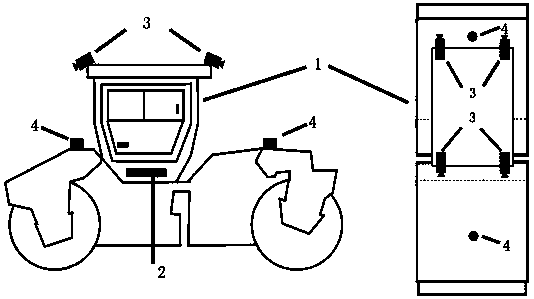
[0036] The road construction robot environment perception system based on multi-source sensor data fusion, including the main body 1 of the road construction robot, such as figure 1As shown, the top four directions of the main body of the robot are respectively provided with cameras 3, the front and rear directions of the main body of the robot are respectively provided with a laser radar 4, and an embedded industrial computer 2 is arranged in the main body of the robot, and the camera 3 and the laser radar 4 are respectively Connected with the embedded industrial computer 2, the camera 3 is used to collect road surface picture data, and the laser radar 4 is used to collect point cloud data; the embedded industrial computer is used to complete the multi-target detection and ranging algorithm acquisition based on data fusion And integrate the category information of the picture data and the distance information of the laser radar, and then from the two directions of the image an...
Embodiment 2
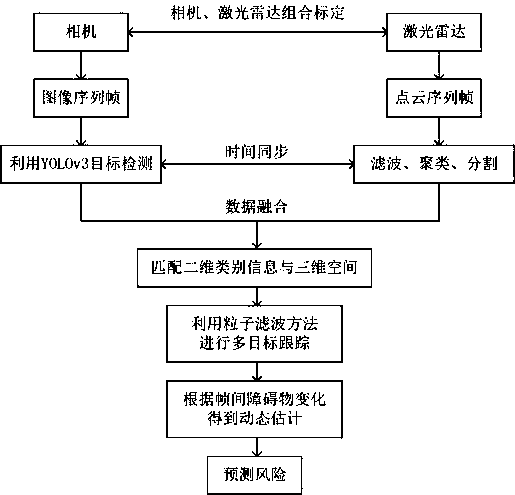
[0040] The environment perception method of road construction robot based on multi-source sensors includes the following steps:
[0041] S1, collect road image data and point cloud data respectively through cameras and lidar.
[0042] S2. Obtain the transformation matrix between the camera and the laser radar coordinate system through the combined calibration method of the camera and the laser radar, and obtain the internal parameter matrix of the camera by Zhang Zhengyou's checkerboard calibration method, and select two-dimensional images and three-dimensional points through multi-checkerboard calibration. For the characteristic corner points of cloud matching, the optimal transformation matrix between the camera and the lidar coordinate system is obtained by using the least square method.
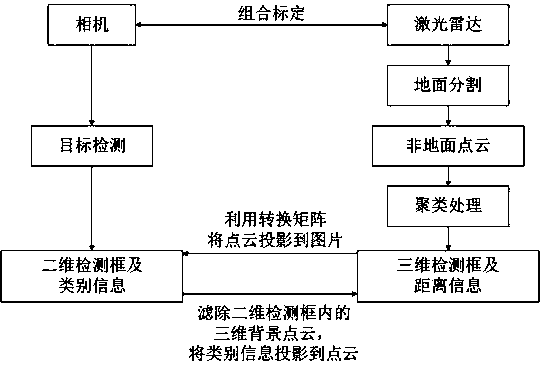
[0043] S3, the multi-target detection and ranging algorithm based on data fusion acquires and fuses the category information of the picture data and the distance information of the laser ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More