

Kinematics estimation and deviation calibration method for crawler tractor
A calibration method and tractor technology, applied in the fields of motor vehicles, transportation and packaging, complex mathematical operations, etc., can solve the problems of poor control effect and low operation precision, and achieve the effects of reducing impact, high real-time performance, and improving automatic driving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0065] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments.
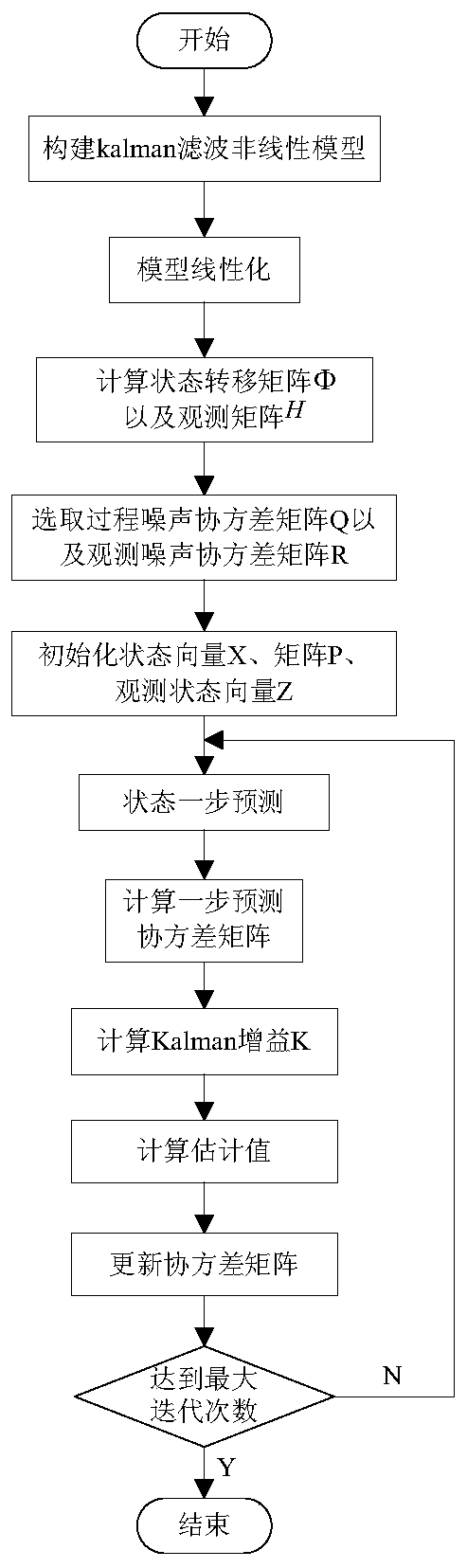
[0066] Reference Figure 1-2 , A method for kinematics estimation and deviation calibration of a crawler tractor, including the following steps,
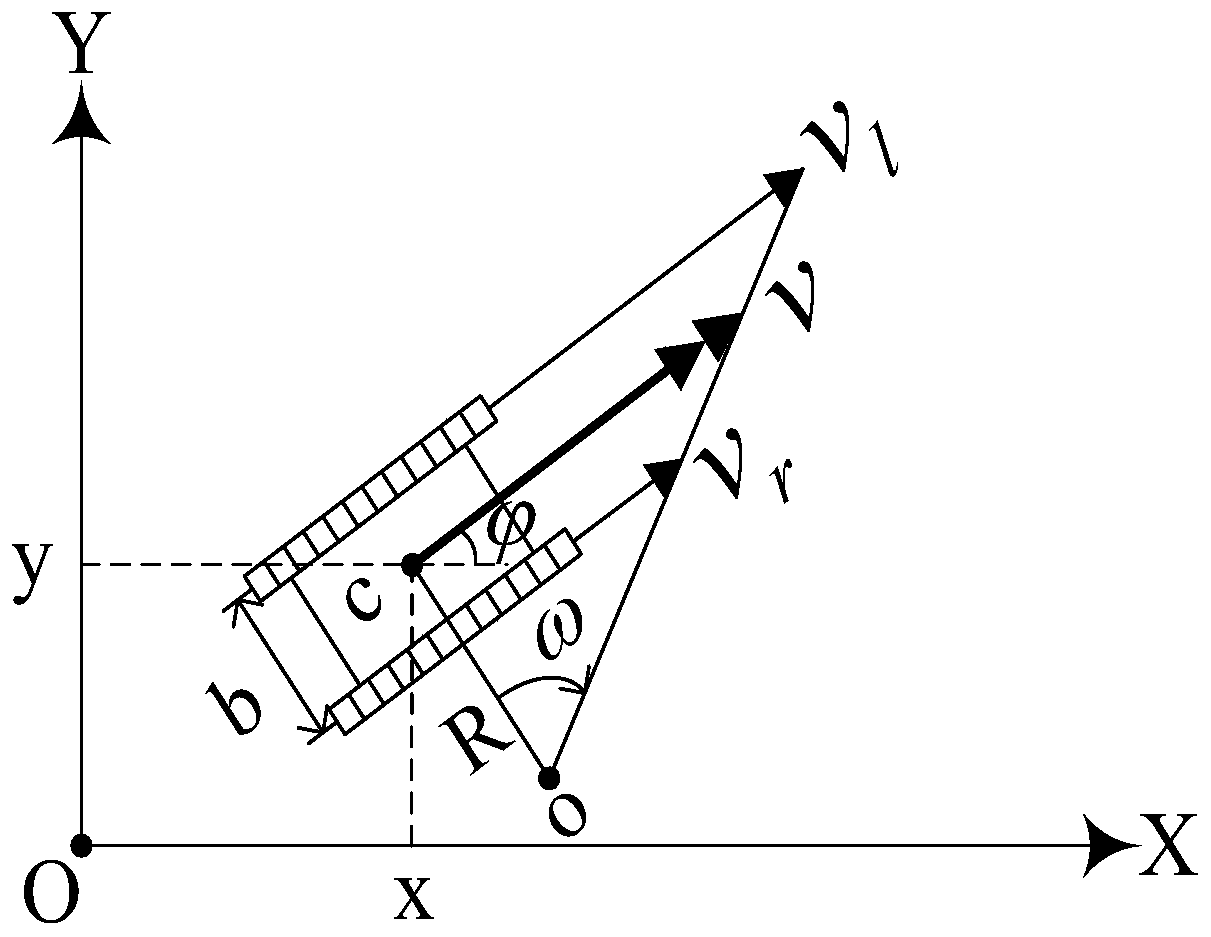
[0067] Step 1: Build a kinematic model of a crawler tractor:
[0068]
[0069]
[0070]
[0071] Among them, x is the east displacement coordinate component of the crawler tractor, y is the north displacement coordinate component, and v is the travel speed of the crawler tractor, Is the heading angle of the crawler tractor, and ω is the angular velocity of the crawler tractor body;
[0072] Step 2: Since the angular velocity of the left wheel, right wheel and the center of mass are equal when the cra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More