

Bearingless asynchronous motor direct suspension force control method based on model prediction
A technology for asynchronous motors and model prediction, applied in motor generator control, AC motor control, electronically commutated motor control, etc., can solve the problems of large influence of motor parameters and unsatisfactory control of radial suspension force accuracy, and achieve The effect of improving reliability and stability, good control performance and good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
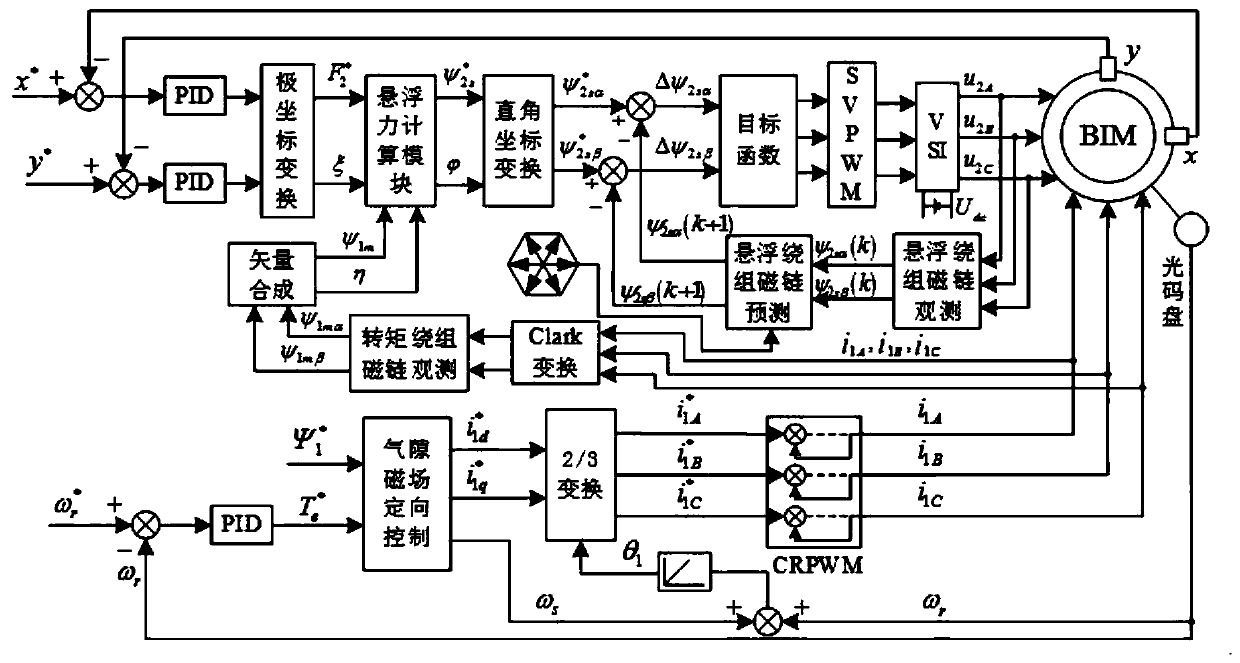
[0045] Such as figure 1 A direct suspension force control method for bearingless asynchronous motors based on model prediction is shown, including torque control and suspension control;
[0046] The suspension control combines the displacement signals x, y measured by the displacement sensor with the given displacement signal x * 、y * Make difference respectively, the difference is adjusted by PID to get the suspension force component F x and F y , the levitation force component undergoes polar coordinate transformation to obtain the radial levitation force amplitude and phase ξ; the three-phas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More