

Indoor mobile robot human-machine integration navigation device and method
A mobile robot and navigation method technology, applied in the field of indoor mobile robot human-machine integrated navigation device, can solve problems such as randomness, inability to model pedestrian motion, and complexity of intention recognition, and achieve the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
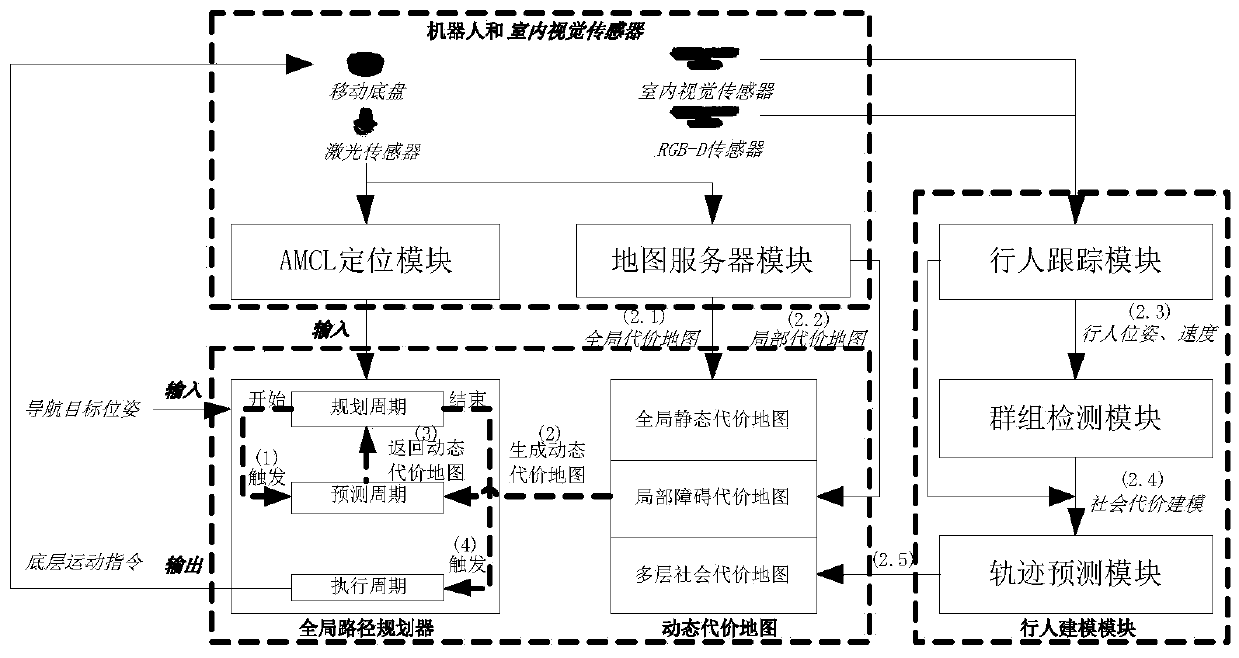
[0044] The present invention provides a human-machine fusion navigation device for a mobile robot in an indoor environment, such as figure 2 . like figure 2 As shown in , the device is divided into four main parts: pedestrian modeling module, dynamic cost map, global path planner, robot and indoor vision sensor. Among them, the global path planner is the core part of the whole system, which is responsible for receiving the navigation target pose and AMCL positioning information, adopts the "planning-prediction-execution" timing cycle for dynamic planning, and constructs the search graph calculation based on the dynamic cost map in each planning cycle The best planning result for the current planning cycle.
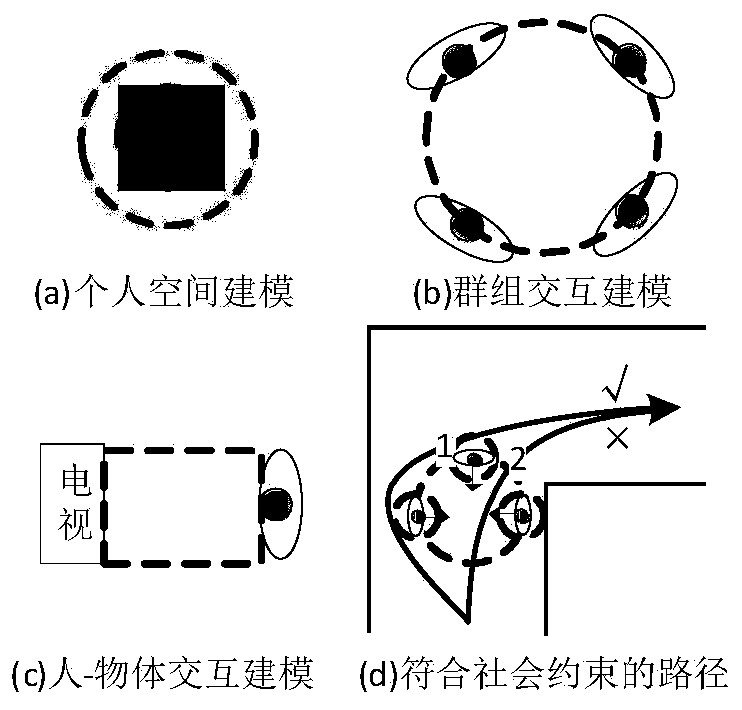
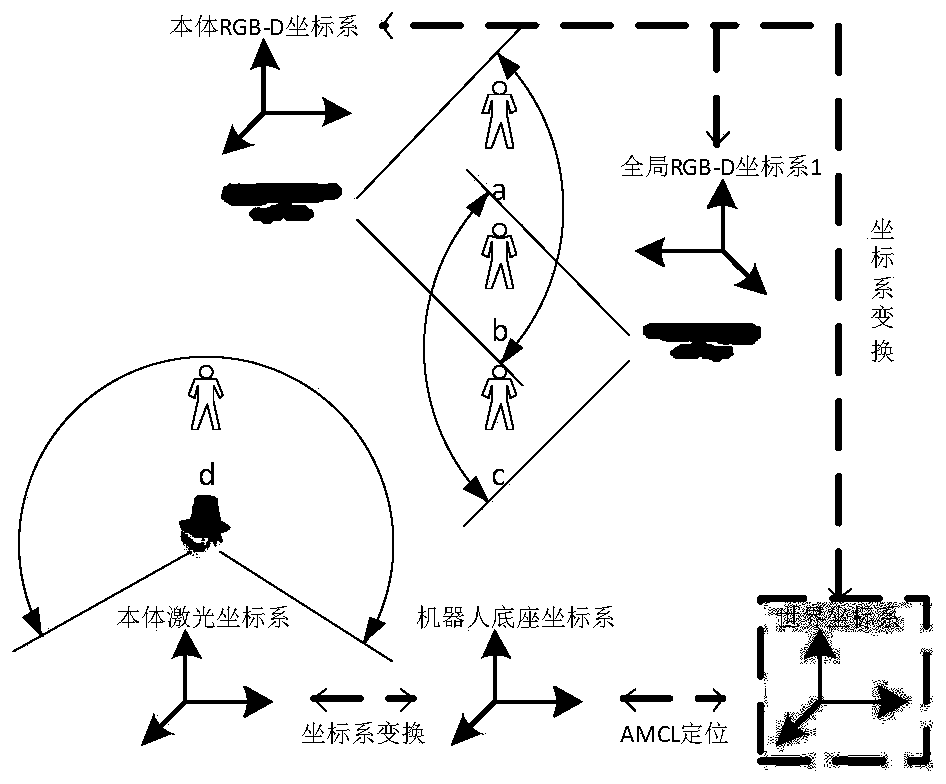
[0045] The pedestrian modeling module converts the pedestrian perception information into the cost map required by the global path planner search map, uses laser sensors and multi-RGB-D sensors to perform global pedestrian perception, and realizes social cost construct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More