

Kinematics forecast compensation mechanism-based surrounding vehicle behavior real-time identification method
A technology of compensation mechanism and identification method, which is applied in the direction of road vehicle traffic control system, traffic control system, special data processing application, etc., can solve the problem of incomplete historical information, little practical significance of intelligent vehicles, lack of real-time recognition and application To achieve the effect of enhancing applicability and accuracy, shortening the calculation time of probability estimation, and enhancing the real-time performance of recognition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with drawings and embodiments.
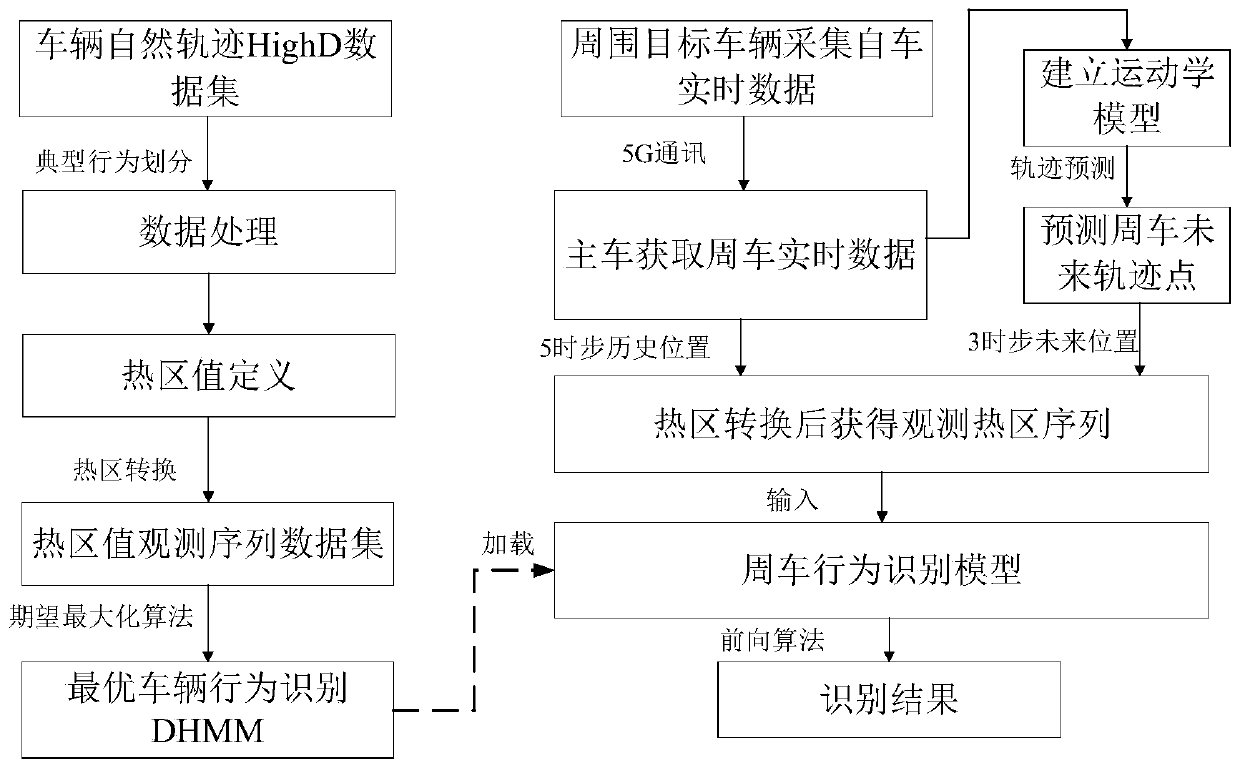
[0040] Such as figure 1 Shown, implementation of the present invention comprises as follows:
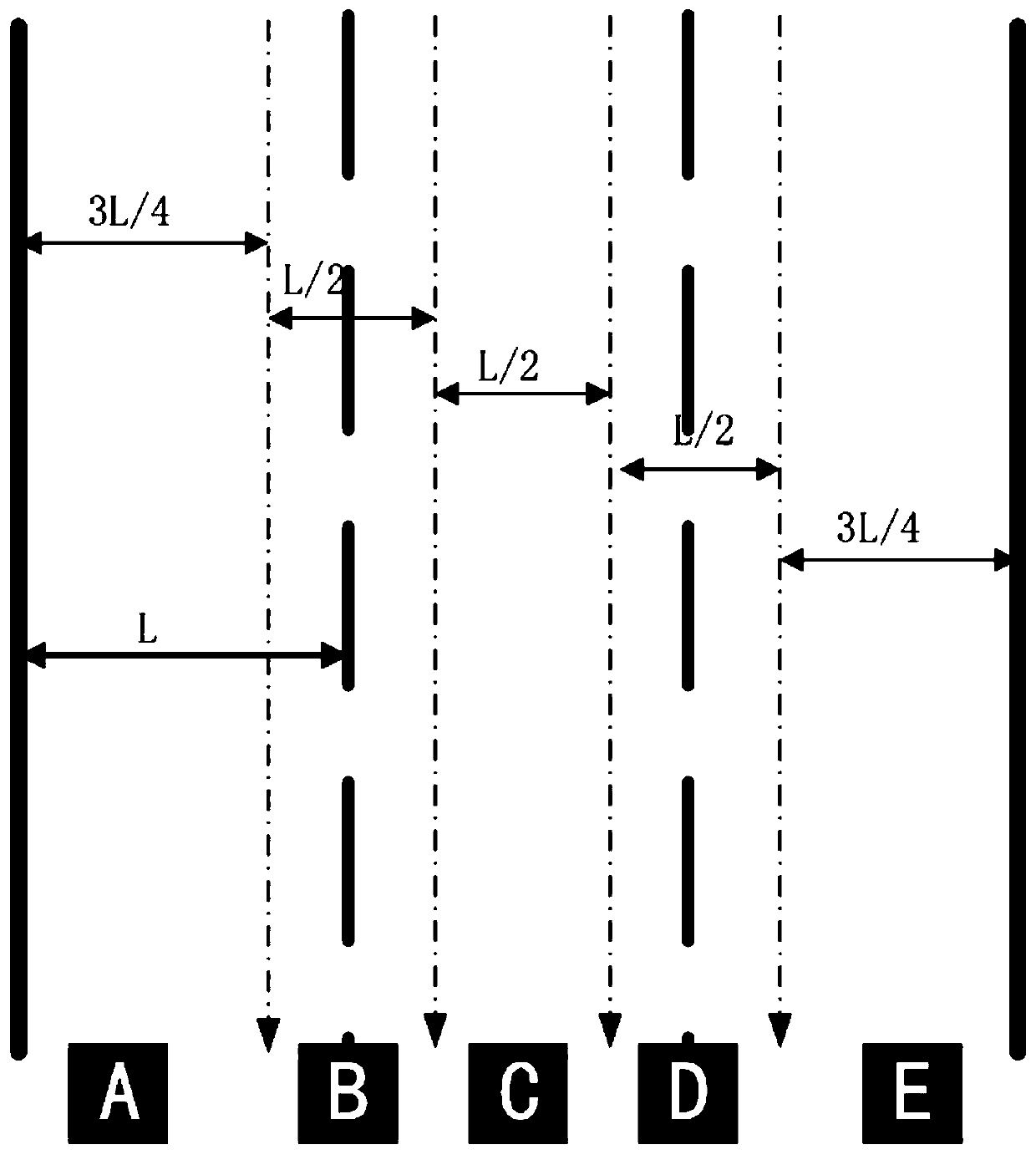
[0041] Step1: The typical behavior of Zhouche and the definition of hot zone
[0042] The typical behaviors of surrounding vehicles are classified into maneuvers, which are left lane change, right lane change, and lane keeping. For vehicles, my country's expressway is a two-way three-lane type. Taking this as an example, the road is divided into five hot spots in combination with the lane line and the shoulder position, and each area has a corresponding hot spot value, which is A, B, C, D, E. Among them, let the lane width be L. Let the area A be between the left shoulder and L / 4 on the right side of the centerline of the left lane, and area B between the L / 4 on the right side of the centerline of the left lane and L / 4 on the left side of the centerline of the middle lane. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More