

Method for establishing fruit tree canopy feature map in orchard
A feature map and fruit tree technology, applied to the details of image stitching, 3D modeling, image enhancement, etc., can solve the problems of inability to ensure the reliability of orchard operation robots, and the inability to adapt to changes in fruit tree leaf color and growth, etc., to achieve reduction Effects of small interference, saving storage space, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
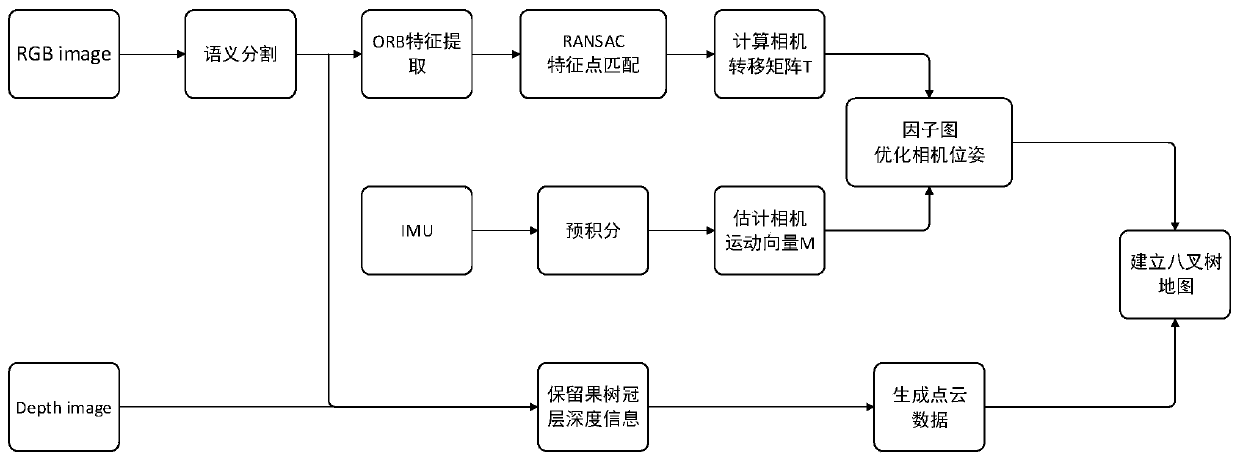
[0055] Use Microsoft's KinectV2 camera to collect image sequences, output color images and depth images at the same time in real time, use MEMS gyroscope to collect IMU data, and synchronize the initial state image frame with IMU data, and output 30FPS image data sequence and 200Hz IMU data sequence.
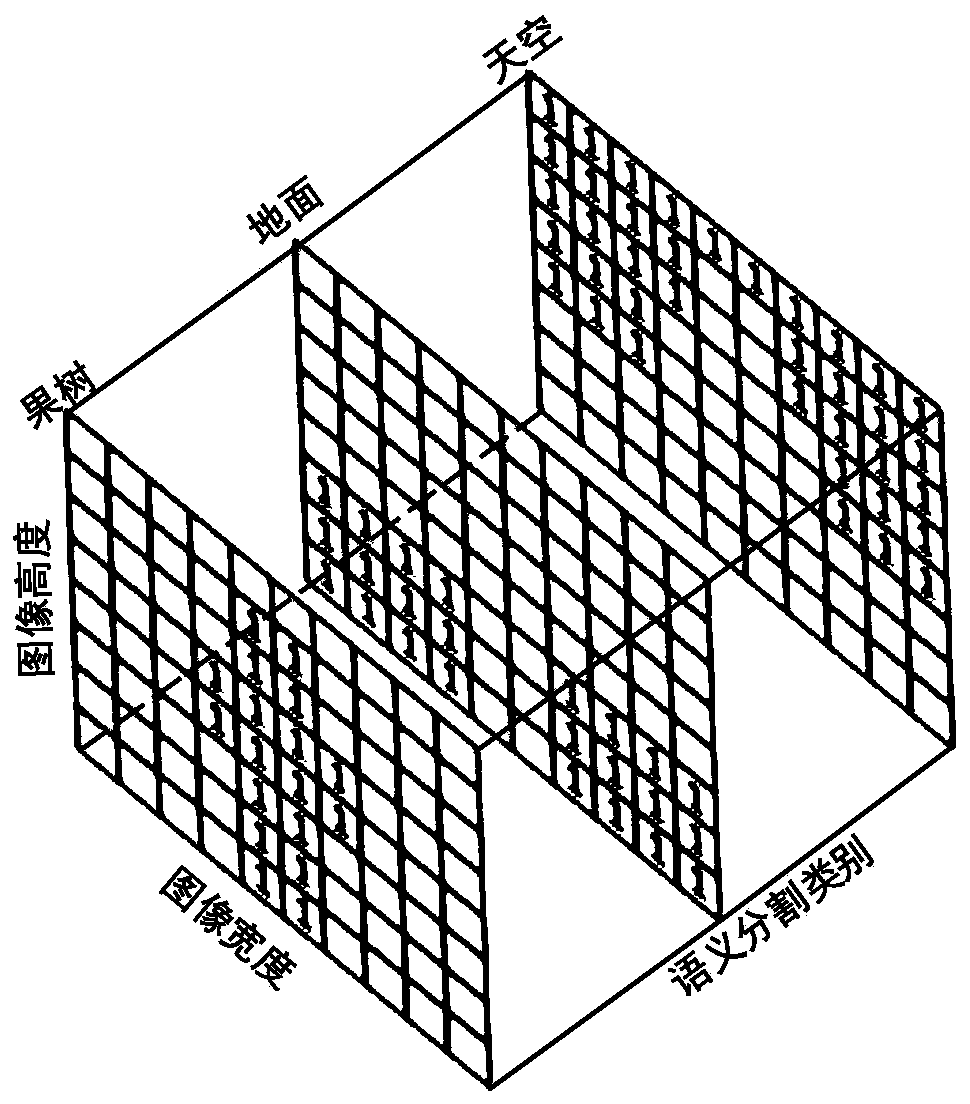
[0056] The DeepLabv3 network is used to segment the fruit tree canopy in the color image, classify each pixel, and predict the target using one-hot encoding, which creates an output channel for each possible class. The final prediction segmentation map can be obtained by taking the argmax of each pixel in each channel.
[0057] Calculate the Oriented FAST key points and the BRIEF descriptor, extract the ORB feature points in the image, pair the feature points in two adjacent frames of images, and use RANSAC (Random Sampling Consistency Algorithm) to eliminate the feature points that do not match the two frames of images.
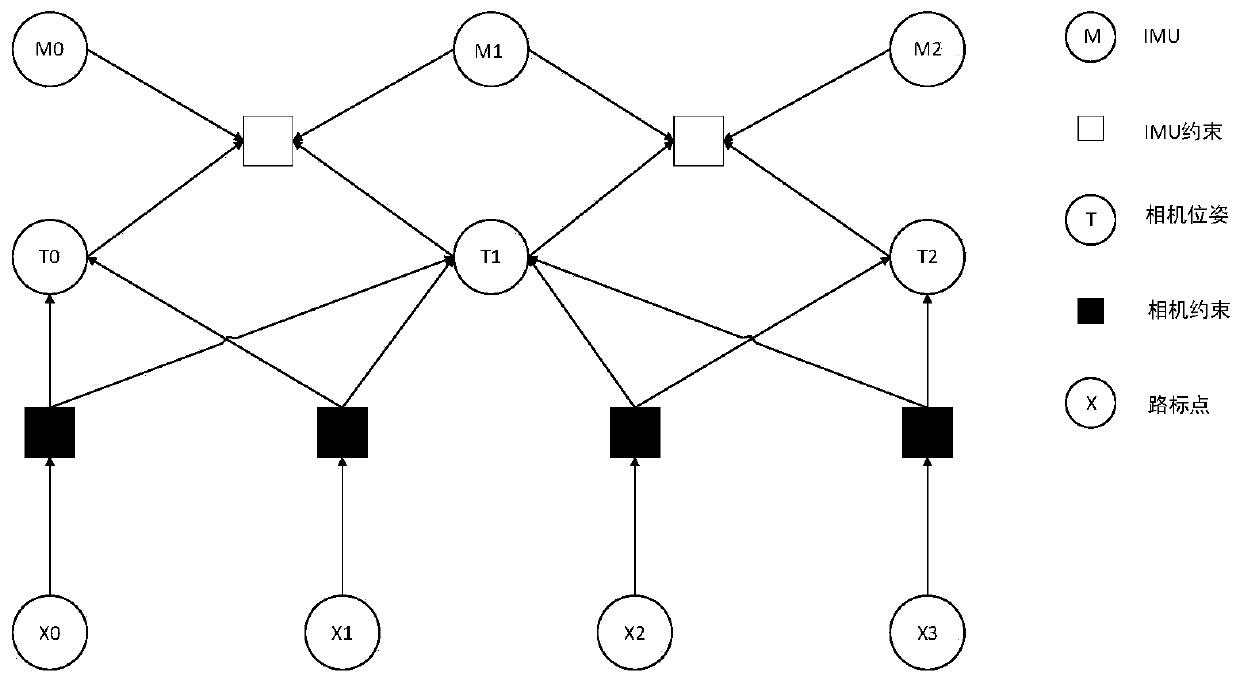
[0058] Then, according to the pixel position of the mat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More