

Control method for mixed trigger consistency of uncertain multi-agent systems with time delay and switching topologies
A multi-agent system and control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of consistency and uncertainty of uncertain multi-agent systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0118] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
[0119] Step 1: Establishment of the motion model of the uncertain multi-agent system
[0120] Consider the following motion model for an uncertain multi-agent system:
[0121]
[0122] where x i is the position of the i-th agent, b is the damping constant, and c is the spring constant.
[0123] Step 2: Consistency controller design and system closed-loop equation establishment
[0124] The controller design is as follows:
[0125]
[0126] In this equation, k is a constant gain, used to calculate the desired distance Substitute (36) into (35) to get:
[0127]
[0128]
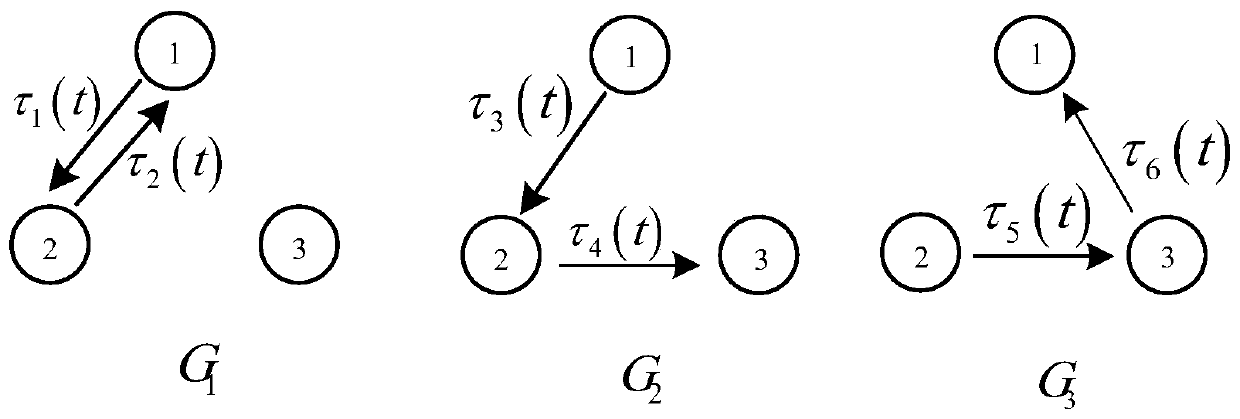
[0129] according to figure 2 The Laplacian matrix can be obtained as follows:
[0130]
[0131] Let π pq = 1, ε pq =±0.1, then we can get:
[0132]
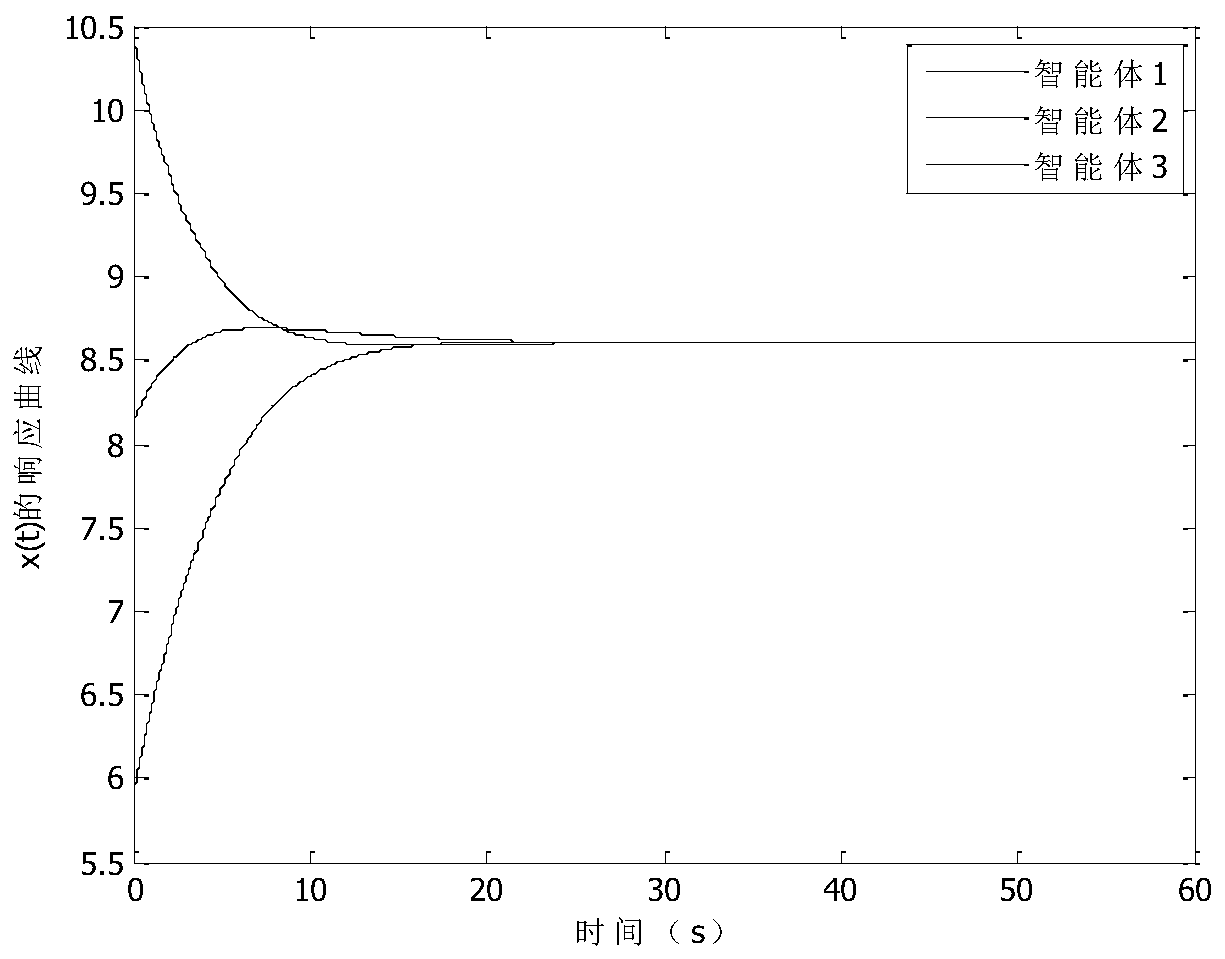
[0133] Step 3: Consistency realization of the closed-loop multi-uncertain multi-agent system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More