

Spacecraft attitude tracking control method based on discontinuous adaptive control
A technology of self-adaptive control and tracking control, applied in the directions of self-adaptive control, non-electric variable control, attitude control, etc., can solve the problems of poor spacecraft attitude tracking control effect and poor robustness of spacecraft attitude tracking control system, etc. Overcome poor robustness, good control performance, and weaken the effect of chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
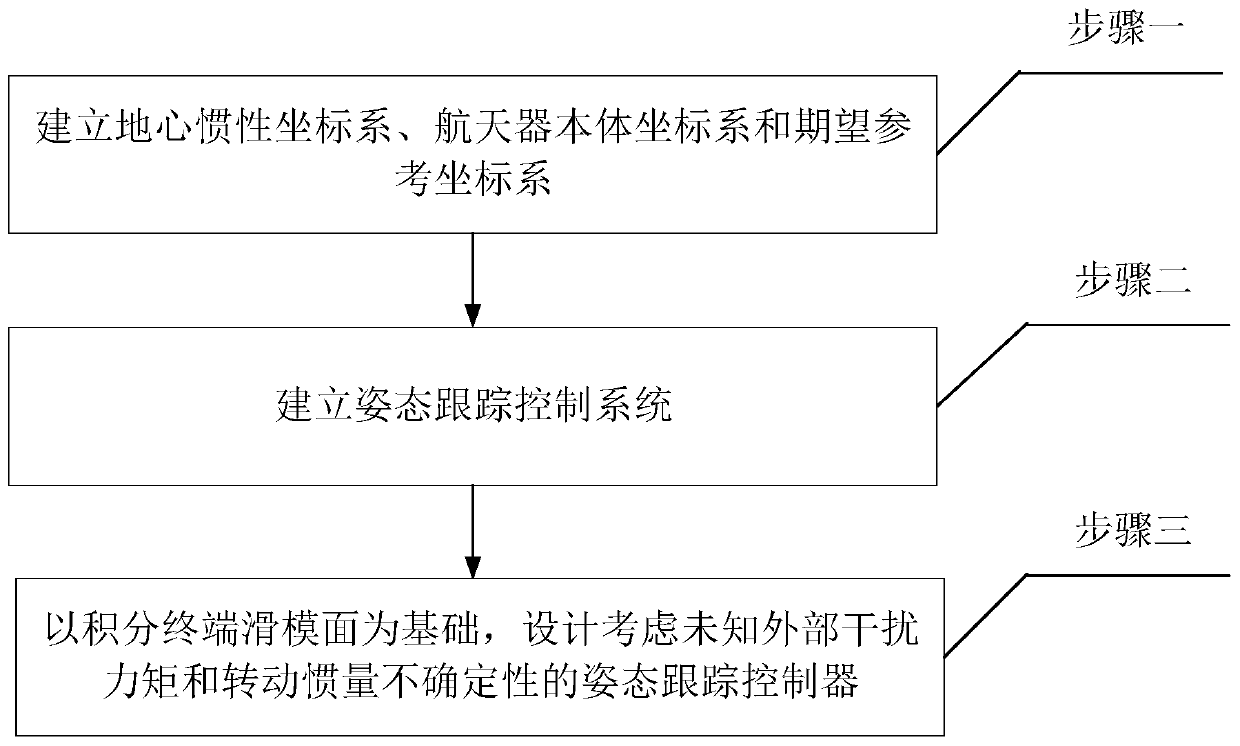
[0026] Specific implementation mode one: as figure 1 As shown, a kind of spacecraft attitude tracking control method based on discontinuous adaptive control described in this embodiment, the method includes the following steps:
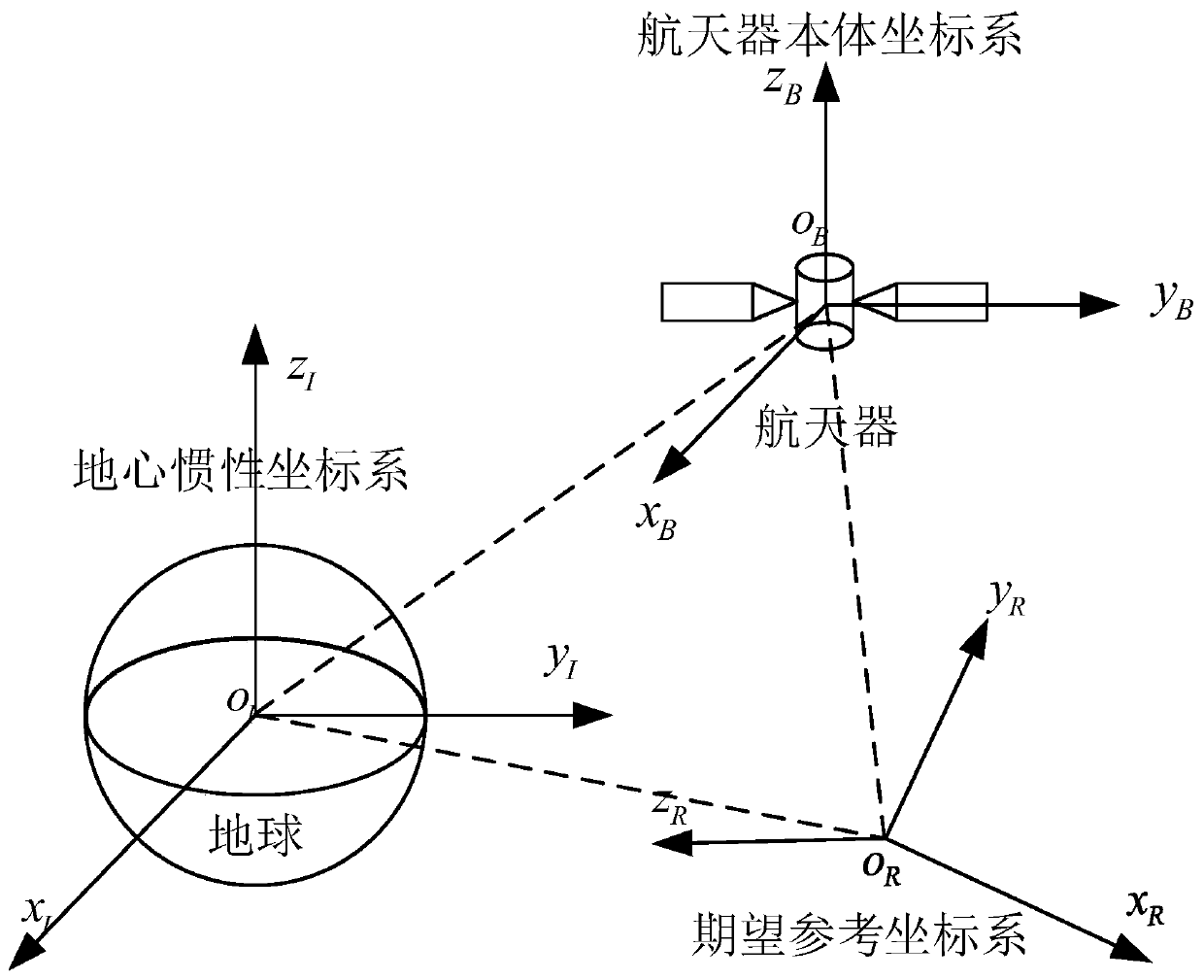
[0027] Step 1. Establish the geocentric inertial coordinate system o I x I the y I z I , Spacecraft body coordinate system o B x B the y B z B and the desired reference frame o R x R the y R z R ;
[0028] Step 2. According to the coordinate system established in step 1, obtain the spacecraft attitude kinematics and dynamics equations described by the attitude quaternion, and the spacecraft error attitude kinematics equation and dynamics equation, that is, the attitude tracking system;
[0029] Step 3. Based on step 2, and based on the integral terminal sliding surface, an attitude tracking controller is designed considering the unknown external disturbance torque and the uncertainty of the moment of inertia.
specific Embodiment approach 2
[0030] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is: the specific process of the step one is:
[0031] Establish the following coordinate system: (Zhang Renwei. Satellite Orbit Attitude Dynamics and Control [M]. Beijing: Beijing University of Aeronautics and Astronautics Press, 2006: 147-155)
[0032] Geocentric inertial coordinate system o I x I the y I z I : The coordinate origin of the earth-centered inertial coordinate system is located at the center of the earth, and the o of the earth-centered inertial coordinate system I x I the y I The plane lies on the equatorial plane, o I x I The axis points in the direction of the equinox in space, o I z I The axis is perpendicular to the equatorial plane and points in the direction of the Earth's North Pole, o I the y I axis and o I x I axis and o I z I The axes together form a right-handed Cartesian coordinate system;
[0033] Spacecraft ...
specific Embodiment approach 3
[0036] Specific implementation mode three: the difference between this implementation mode and specific implementation mode two is: the specific process of said step two is:
[0037] Considering the non-singularity of the attitude quaternion, the present invention is mainly based on the attitude quaternion (Shuster M D.Asurvey of attitude representations[J].The Journal of the AstronauticalSciences, 1993,41(4):439-517.) Describe the attitude motion of the spacecraft.
[0038] definition is the attitude quaternion of the spacecraft body coordinate system relative to the earth-centered inertial coordinate system, where q 0 is the scalar part of the attitude quaternion q, q v is the vector part of the attitude quaternion q, the superscript T represents the transpose of the matrix, and
[0039] Define ω=[ω 1 ,ω 2 ,ω 3 ] T is the angular velocity of the spacecraft body coordinate system relative to the earth-centered inertial coordinate system, ω 1 , ω 2 and ω 3 Both are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More