Aerial-sea-underwater multi-robot remote stereo cooperative control system and control method thereof
A technology of aerial robots and underwater robots, which is applied to the control of finding targets, etc. It can solve the problems of information transmission and processing delays, difficult power consumption, and poor information exchange, so as to improve mobility and flexibility and reduce construction usage. cost, and the effect of avoiding routine equipment maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The implementation of the present invention will be described in detail below in conjunction with the examples, but they do not constitute a limitation of the present invention, and are only examples. At the same time, the advantages of the present invention will become clearer and easier to understand.
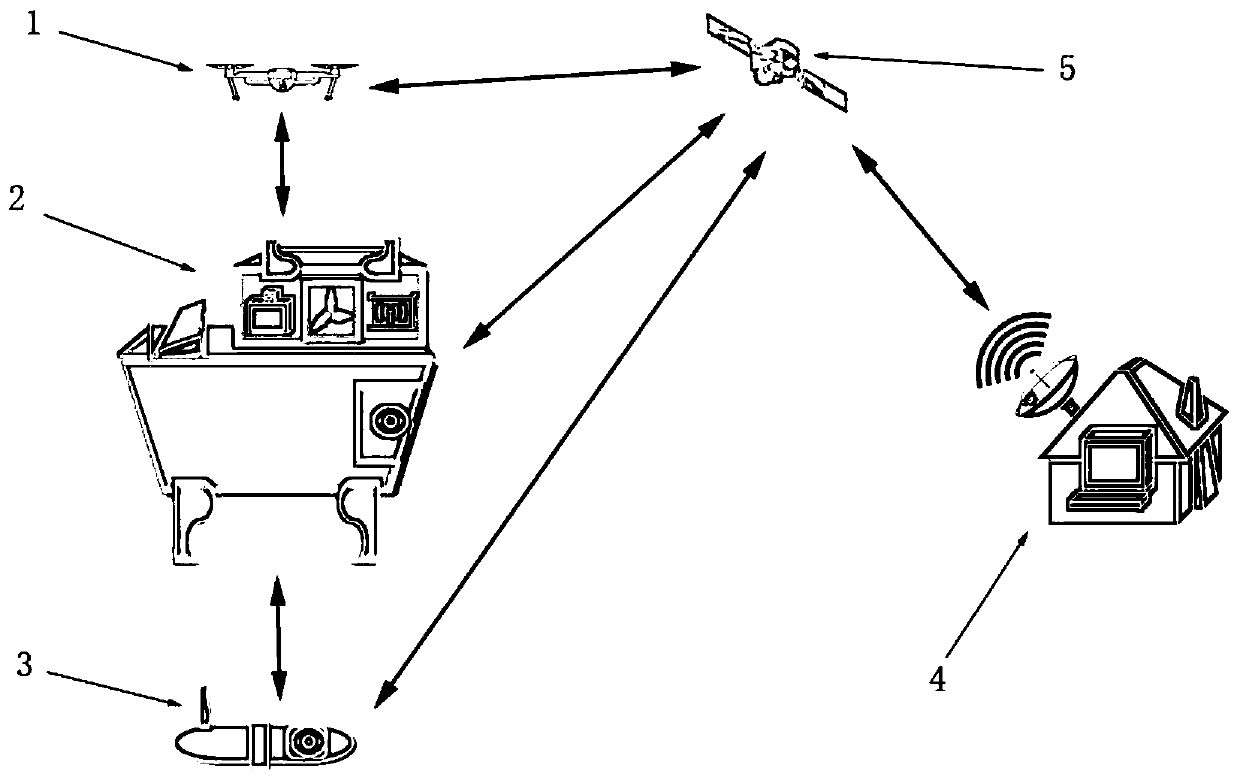
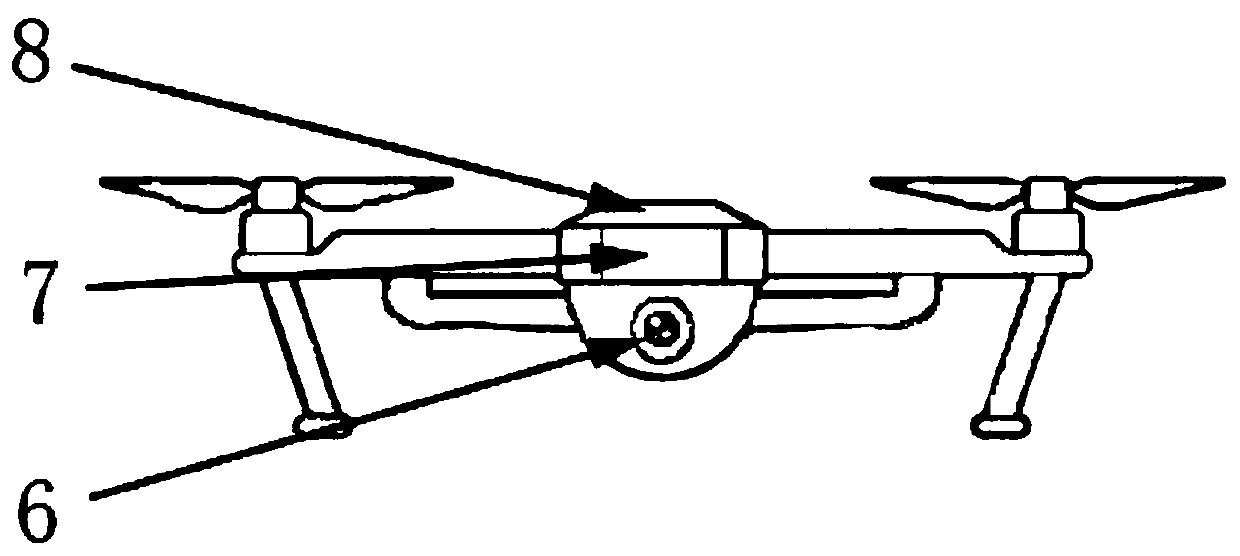
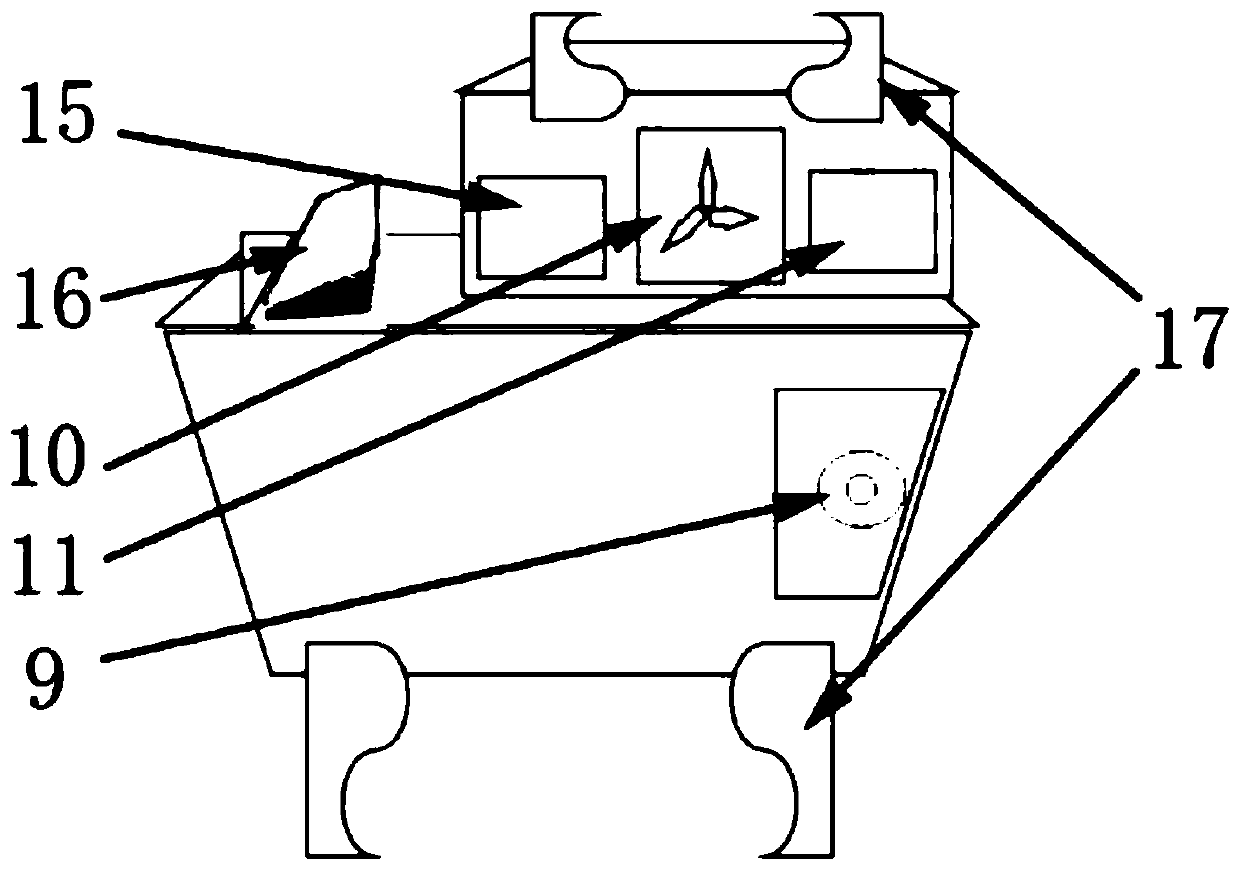
[0041] A remote three-dimensional cooperative control system for air, sea, surface and underwater multi-robots, comprising an aerial robot 1, a sea surface robot 2, an underwater robot 3, and a land remote monitoring host 4; the aerial robot 1 includes an aerial robot environment perception module 6, an aerial robot Robot data acquisition module 7, aerial robot remote control module 8; The signal output end of described aerial robot environment perception module 6 is connected with the signal input end of aerial robot data acquisition module 7, and the output end of described aerial robot data acquisition module 7 is connected with The data input terminal of aerial rob...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap