

An airborne platform-based UAV swarm control system and method
A cluster control and unmanned aerial vehicle technology, which is applied in control/adjustment system, non-electric variable control, three-dimensional position/channel control, etc., can solve the problem of individual information interaction of unmanned aerial vehicles relying on satellite positioning signals, and achieve improved anti-interference capability, reduced manufacturing and operating costs, and efficient strike effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
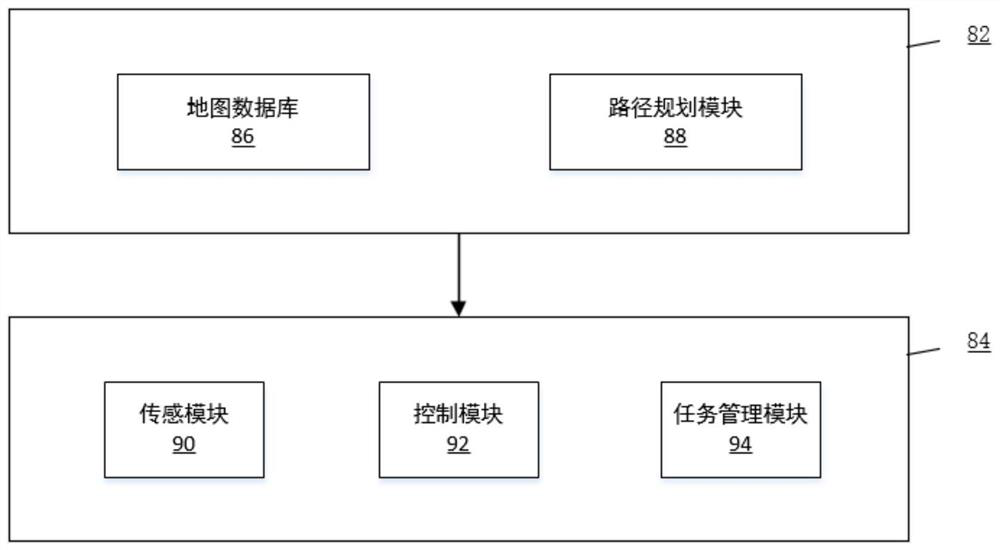
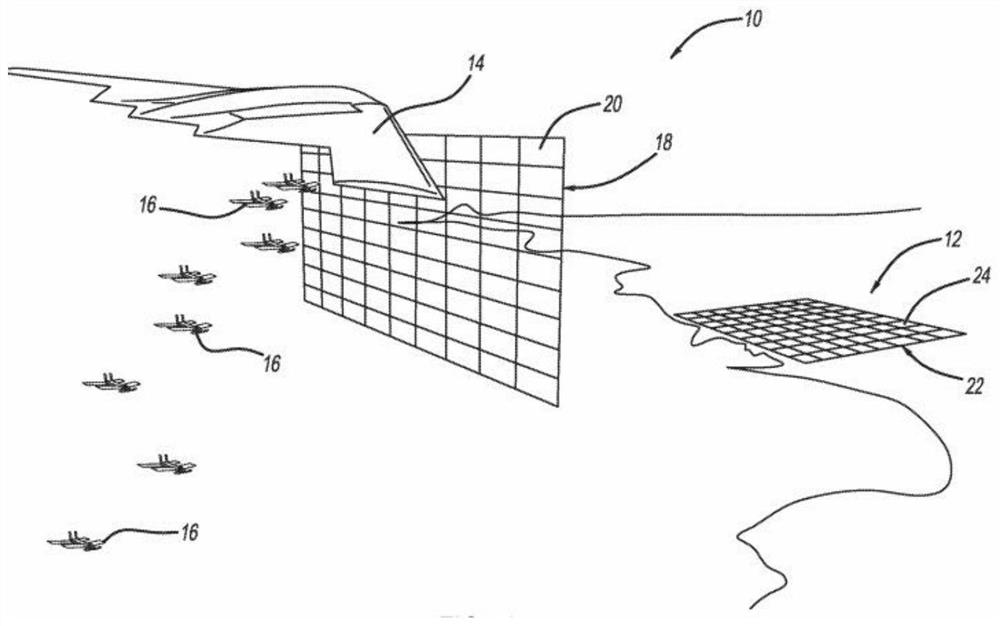
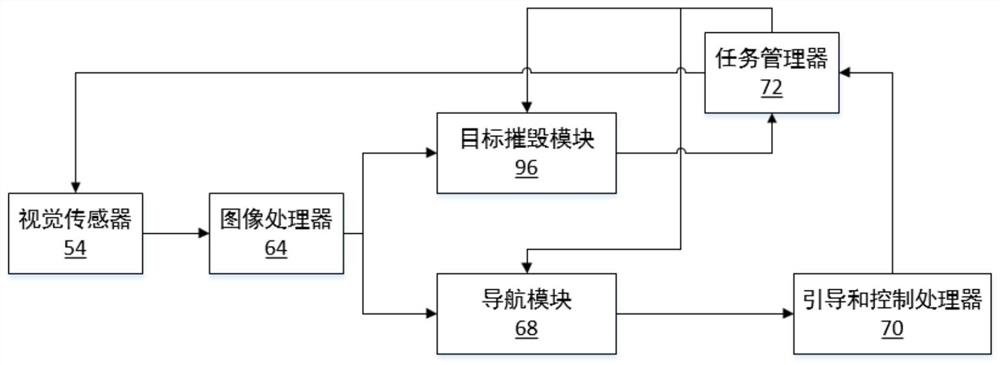
[0034] refer to figure 1 and figure 2, a UAV cluster control system based on an airborne platform proposed by the present invention, including a cluster control system installed on an unmanned aerial vehicle, and a map database and a path planning module arranged on a mobile airborne platform; the mobile airborne platform Ability to store and release drone swarms consisting of multiple drones.
[0035] The map database and the path planning module are used to construct a spatial grid structure and a target area grid structure, and guide the unmanned aerial vehicle to approach the target area; the cluster control system realizes the flight control of the unmanned aerial vehicle group, guides the unmanned aerial vehicle to approach and destroy the target.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More