

Method for obtaining canopy point cloud based on RTK-GPS and mobile 2D laser scanning
A two-dimensional laser and acquisition method technology, which is applied in the re-radiation of electromagnetic waves, satellite radio beacon positioning systems, measurement devices, etc., can solve the problem of inaccurate point cloud data and achieve the effect of accurate data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
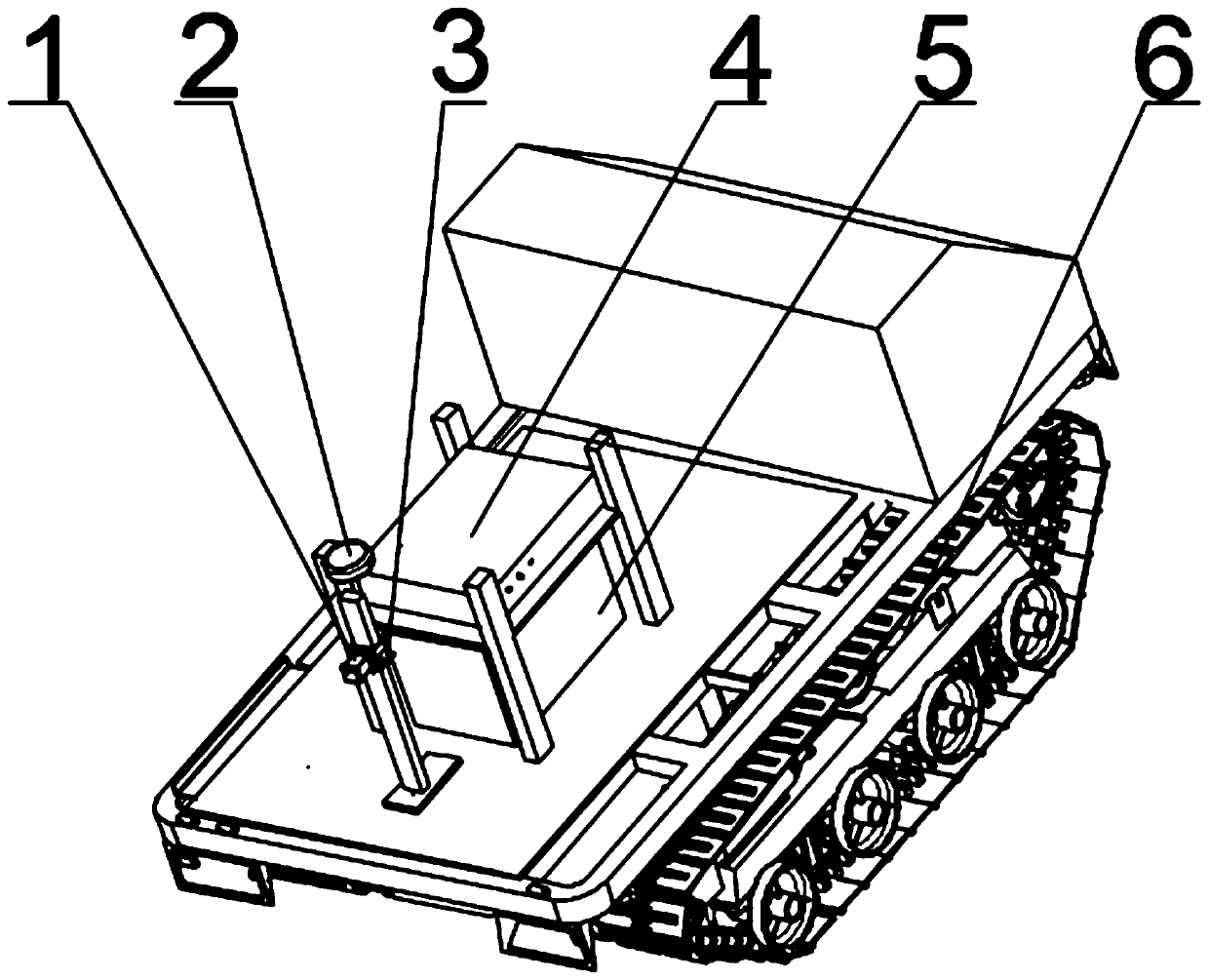
[0042] Three-dimensional green quantity measurement device for orchards based on RTK-GPS and mobile two-dimensional laser scanning, see figure 1 , which includes a two-dimensional laser scanner 1, a self-propelled vehicle 6, a GPS sensor (GPS mobile station) 2, an inertial measurement unit (IMU) 3; a data acquisition box 4. A column is fixed on the self-propelled vehicle 6, and a two-dimensional laser scanner 1 is fixed on the column, and an inertial measurement unit (IMU) 3 is arranged on the two-dimensional laser scanner 1. A GPS sensor 2 is arranged above the column. The data acquisition box 4 is electrically connected with the GPS sensor 2, the inertial measurement unit (IMU) 3, and the two-dimensional laser scanner 1, respectively, for data acquisition. The power supply 5 provided on the self-propelled vehicle 6 provides electric energy for the GPS sensor 2, the inertial measurement unit (IMU) 3, the two-dimensional laser scanner 1, and the like.
[0043] Canopy point ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More