High real-time control system of robot single leg based on ethercat
A control system and robot technology, applied in general control systems, control/regulation systems, computer control, etc., can solve problems such as poor anti-interference ability and lack of real-time systems, and achieve high real-time performance, good real-time performance and compliance. , reduce the effect of complex wiring
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
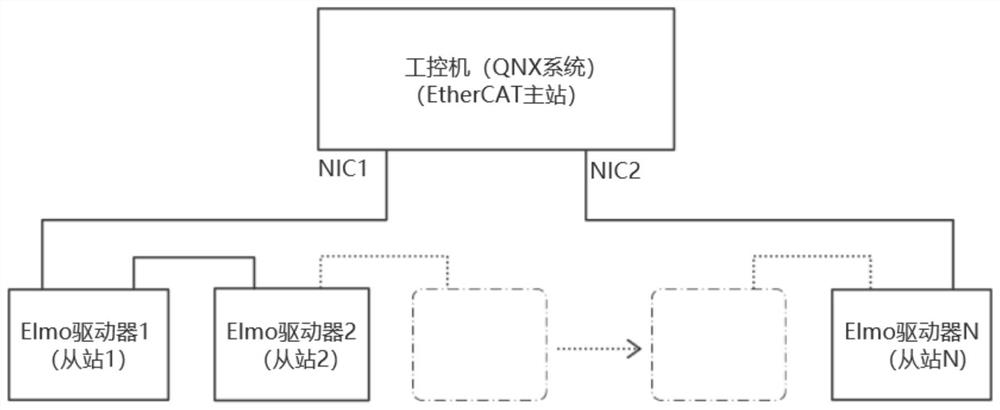
[0039] In the present invention, the electric-driven single-leg robot based on EtherCAT has two slave stations, which provide a solution for building a network topology of a quadruped robot, and the slave stations can be expanded to multiple, such as figure 1 shown. The EtherCAT network is a linear topology and a ring structure. One cable has two channels to achieve full-duplex mode. Each device has two communication channels for cable redundancy, requiring only another Ethernet port. Channel switching can be realized through online hot plugging. The industrial computer using the QNX real-time operating system is used as the master station, and the Elmo DC servo drive is used as the slave station. The Elmo drive slave station is connected to the industrial computer through a ring structure.
[0040] The single-leg real-time control system of the electrically driven leg-foot robot of the present invention is based on EtherCAT communication. like figure 2 , the control syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More