

Electrostatic adsorption pneumatic soft gripper
A technology of electrostatic adsorption and software, applied in the direction of manipulators, manufacturing tools, chucks, etc., to achieve the effect of not easy to wear, large quality, and strong integrity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
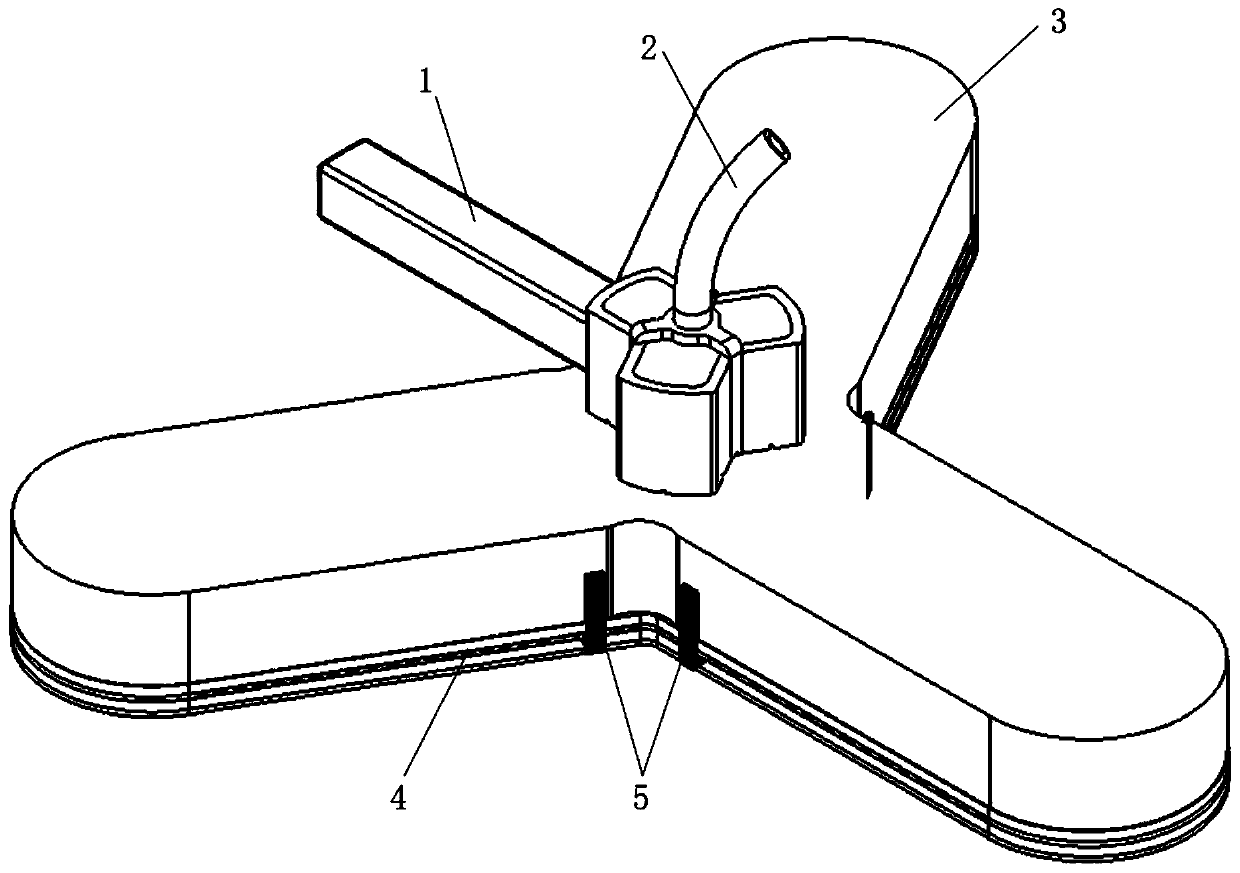
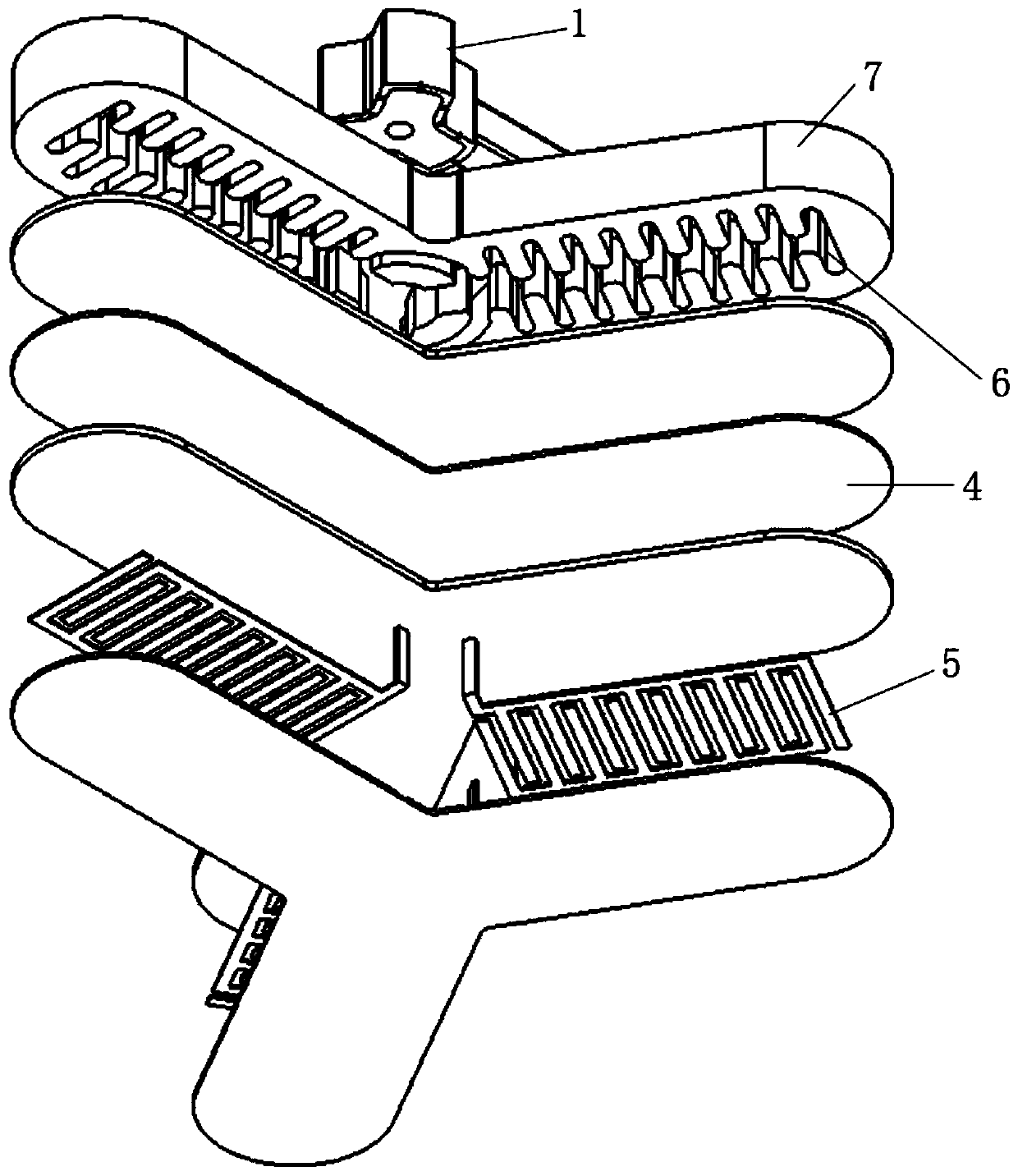
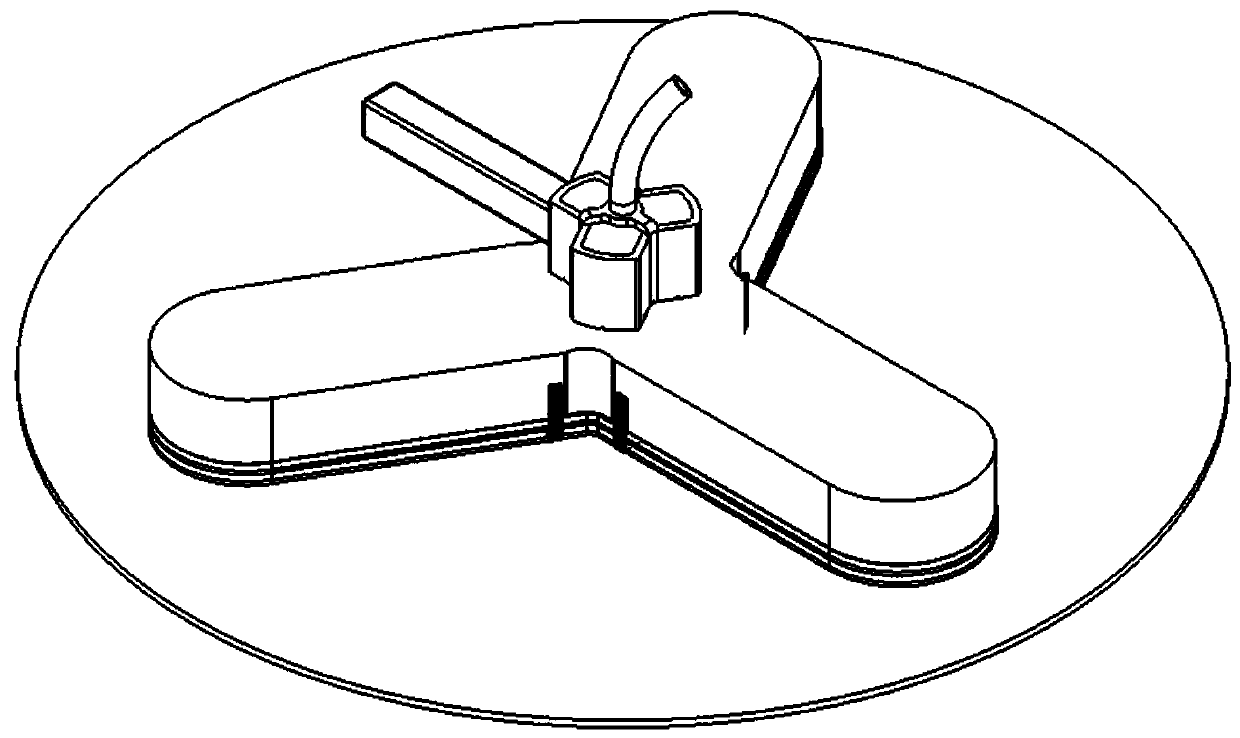
[0033] figure 1 It is a structural schematic diagram of the electrostatic adsorption type pneumatic software gripper device of the present invention, figure 2 It is an explosion diagram of the electrostatic adsorption type pneumatic software gripper of the present invention, image 3 It is a schematic diagram of the adsorption state structure of the present invention, Figure 4 It is a partial fracture diagram of the electrostatic adsorption type pneumatic software gripper of the present invention, Figure 5 It is a schematic diagram of the airway structure of the electrostatic adsorption type pneumatic soft gripper of the present invention, Figure 6 It is a schematic diagram of the comb-shaped electrode structure of the present invention, Figure 7 It is a schematic diagram of the mold structure of the electrostatic adsorption type pneumatic software gripper of the present invention, as shown in the figure: a three-finger electrostatic adsorption type pneumatic soft grip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More