

Fuzzy wavelet neural control method of MEMS (micro electro mechanical system) gyroscope with no overshoot and guaranteed cost
A control method and gyroscope technology, applied to gyroscope/steering sensing equipment, gyroscope effect for speed measurement, instrument and other directions, can solve the problem of MEMS gyroscope tracking error transient no overshoot guaranteed performance control, low calculation complexity issues such as accuracy, closed-loop stability, and robustness deterioration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with specific examples.
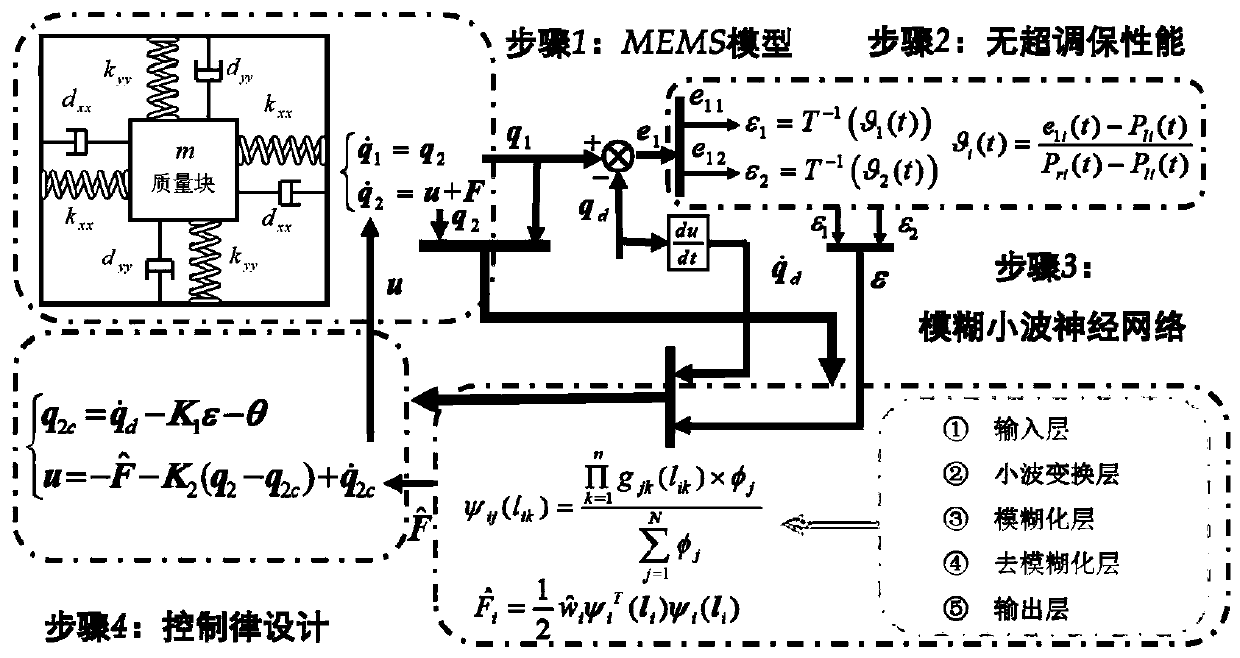
[0050] A MEMS gyroscope fuzzy wavelet neural control method with no overshoot and guaranteed performance, such as figure 1 shown, including the following steps:
[0051] (1) Establish a dimensionless strict feedback dynamics model of the MEMS gyroscope including lumped disturbances:
[0052] The dimensionless strict feedback dynamics model of the MEMS gyroscope is given as follows:
[0053]
[0054] In the formula, q 1 =[x,y] T , x and y are the dimensionless displacements of the driving and detecting modes of the gyroscope mass, respectively; and are the dimensionless velocities of the two modes of the gyroscope respectively, u=[u x , u y ] T , u x and u y is the dimensionless control input of the two modes of the gyroscope; F=[F x , F y ] T =-(D+2Ω)q 2 -Kq 1 +ξ is the lumped disturbance of the drive / detection mode including gyroscope spring coefficient...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More