

Driverless racing car accelerator pedal device
An accelerator pedal and unmanned driving technology, which is applied to the layout of the power plant control mechanism, vehicle components, transportation and packaging, etc., to achieve the effects of easy disassembly, easy control, and improved control reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
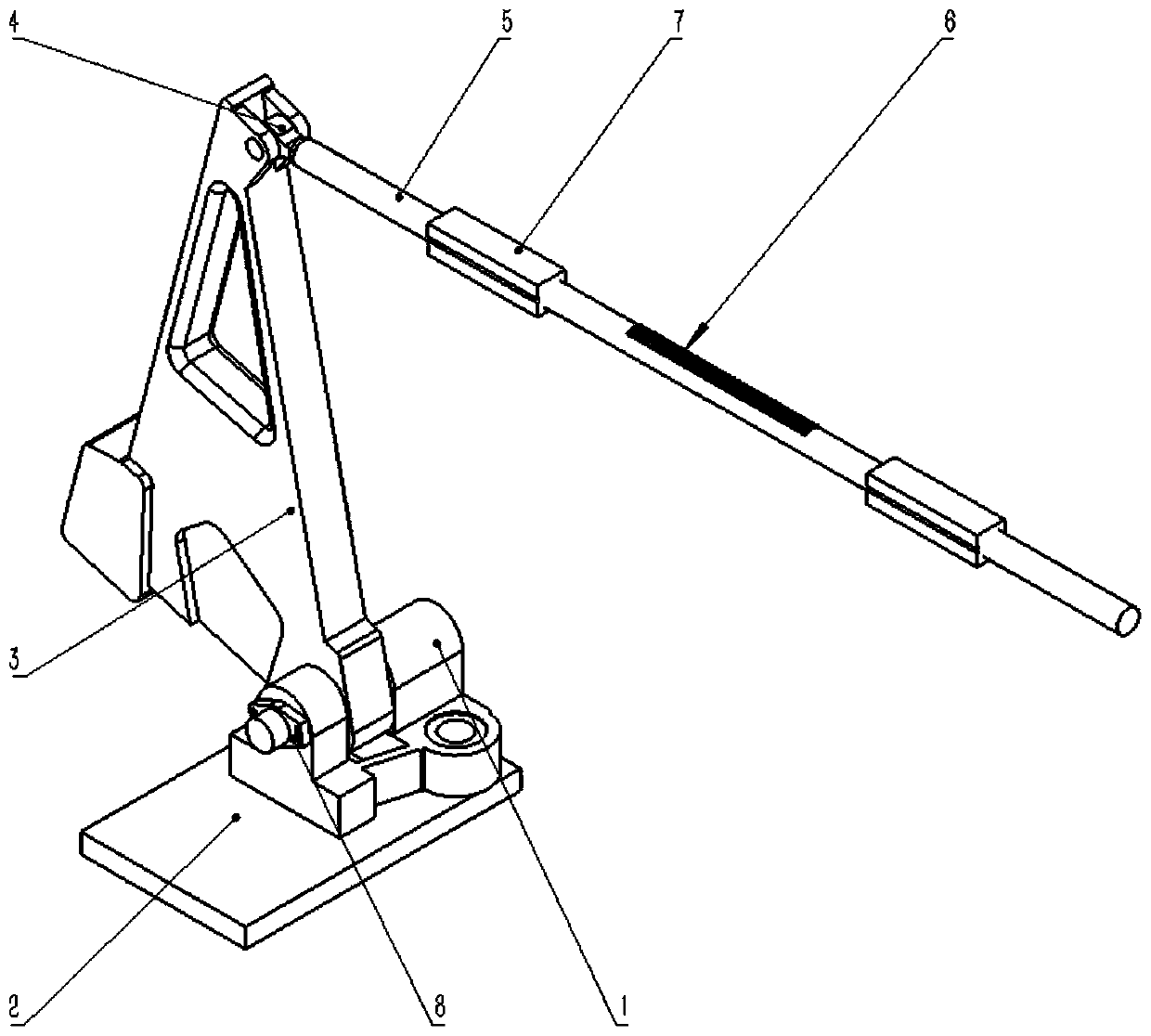
[0022] The invention discloses an accelerator pedal 3 device for an unmanned racing car, including a control part and a drive part, wherein:
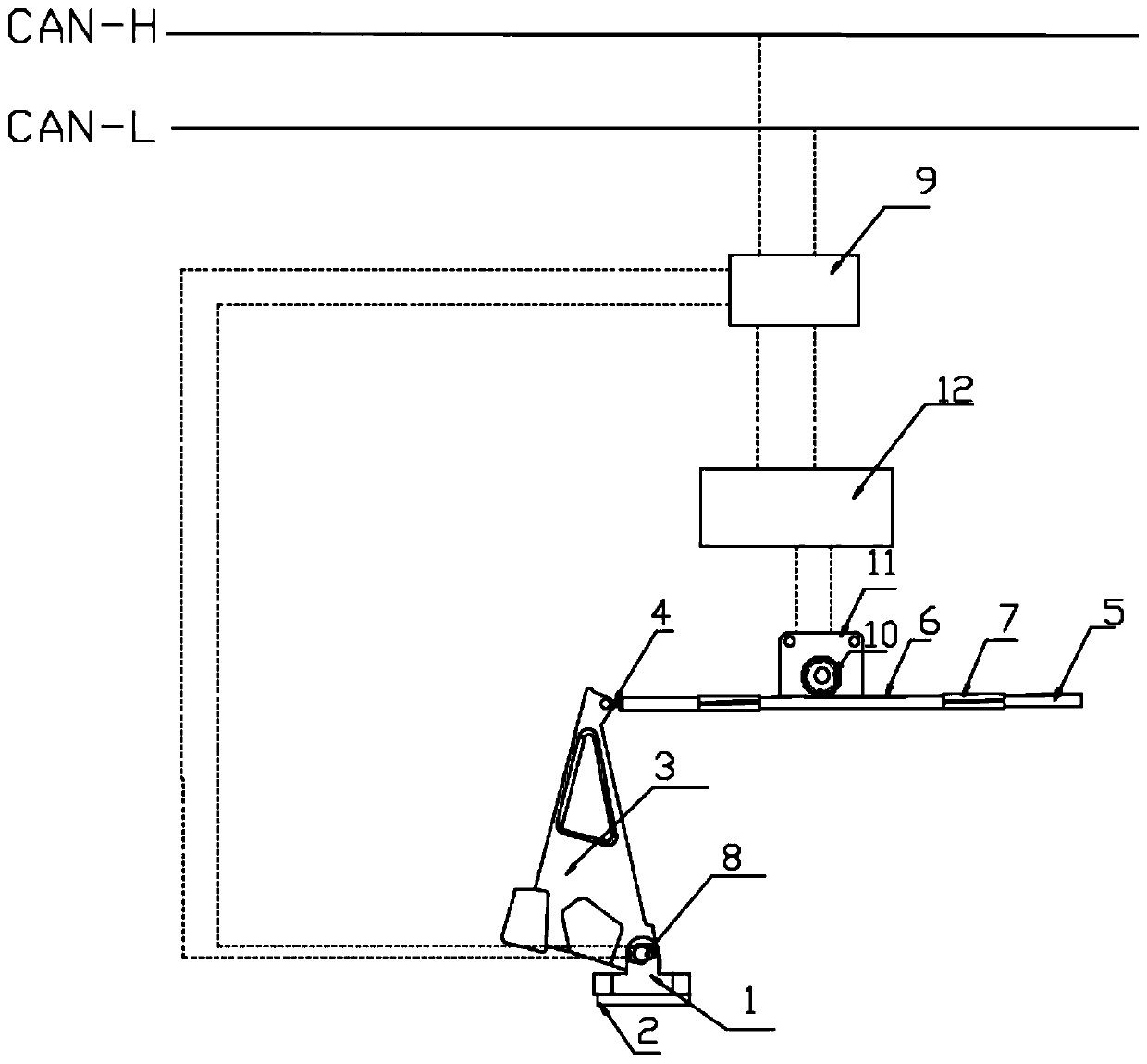
[0023] The control part includes an accelerator pedal angle sensor 8 installed at the rotating shaft of the accelerator pedal 3, which is used to acquire the position signal of the accelerator pedal 3 in real time and transmit it to the signal processor 9; the position signal refers to the accelerator pedal 3 The angular position of the rotation around its axis.
[0024] The signal processor 9 is connected with the CAN bus of the racing car, and is used to receive the desired acceleration signal from the CAN bus, convert the desired acceleration signal into the position signal of the accelerator pedal 3, and compare it with the acceleration obtained from the accelerator pedal angle sensor 8 The real-time position signal of the pedal 3 is compared, and the control signal is output according to the comparison result. The motor controller ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More