

Post collision analysis-based vehicle action optimization for autonomous driving vehicles
A technology for autonomous driving and vehicles, applied in the direction of motor vehicles, vehicle position/route/altitude control, collision avoidance systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
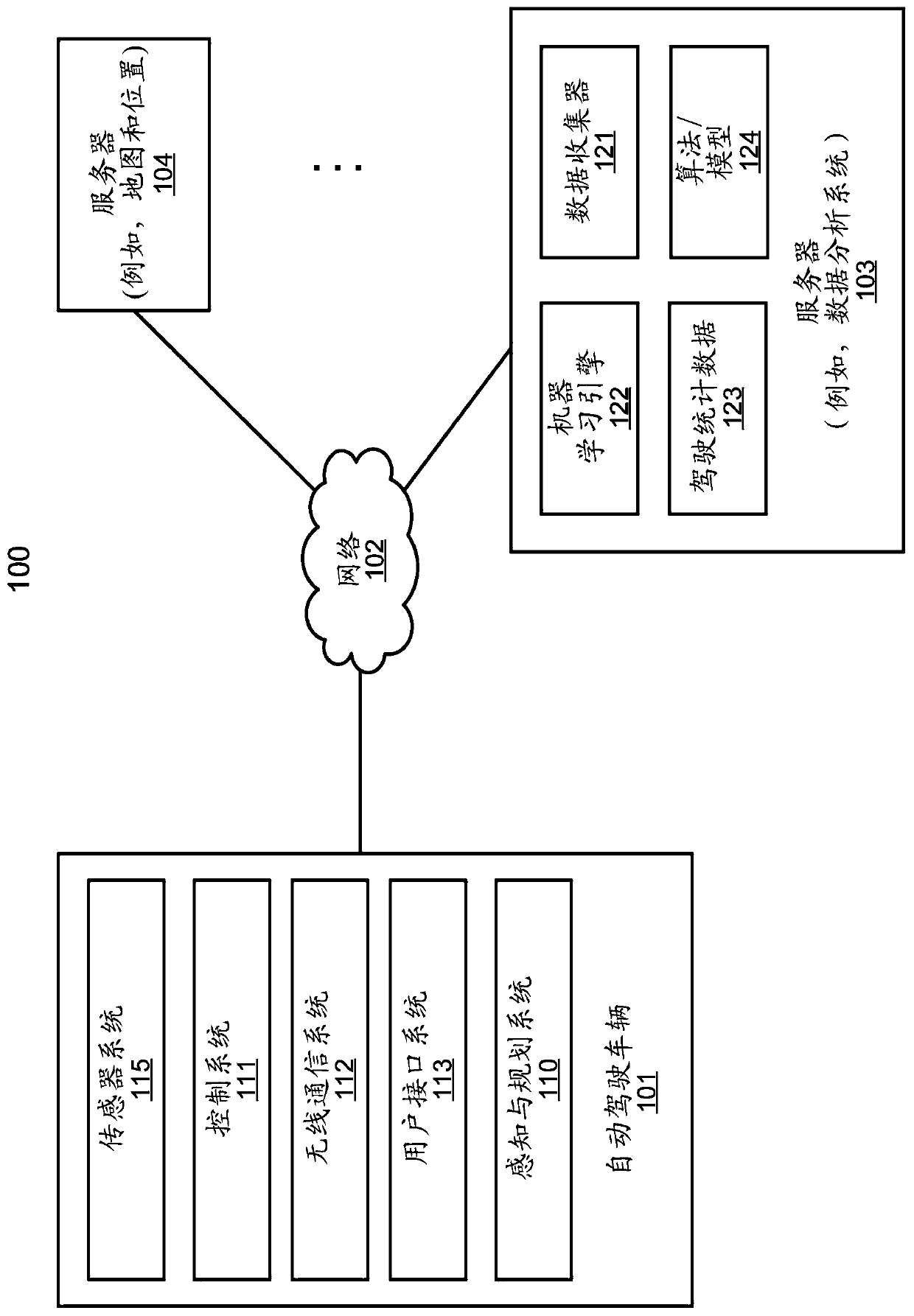
[0020] figure 1 is a block diagram illustrating an autonomous vehicle network configuration according to one embodiment of the present disclosure. refer to figure 1 , network configuration 100 includes an autonomous vehicle 101 communicatively coupled to one or more servers 103 - 104 over a network 102 . Although one autonomous vehicle is shown, multiple autonomous vehicles may be coupled to each other and / or to servers 103 - 104 over network 102 . Network 102 may be any type of network, eg, a wired or wireless local area network (LAN), a wide area network (WAN) such as the Internet, a cellular network, a satellite network, or a combination thereof. Servers 103 to 104 may be any type of server or cluster of servers, such as web or cloud servers, application servers, backend servers or combinations thereof. The servers 103 to 104 may be data analysis servers, content servers, traffic information servers, map and point of interest (MPOI) servers, or location servers, etc.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More