

High-precision point cloud registration method for three-dimensional laser scanning
A point cloud registration, three-dimensional laser technology, applied in the direction of using optical devices, image data processing, measurement devices, etc., can solve the problems of slow registration speed, low registration accuracy, low registration accuracy, etc. Improved accuracy, fast and accurate extraction, and high matching accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The technical scheme of a high-precision point cloud registration method for 3D laser scanning provided by the present invention will be further described below in conjunction with the accompanying drawings, so that those skilled in the art can better understand the present invention and implement it.
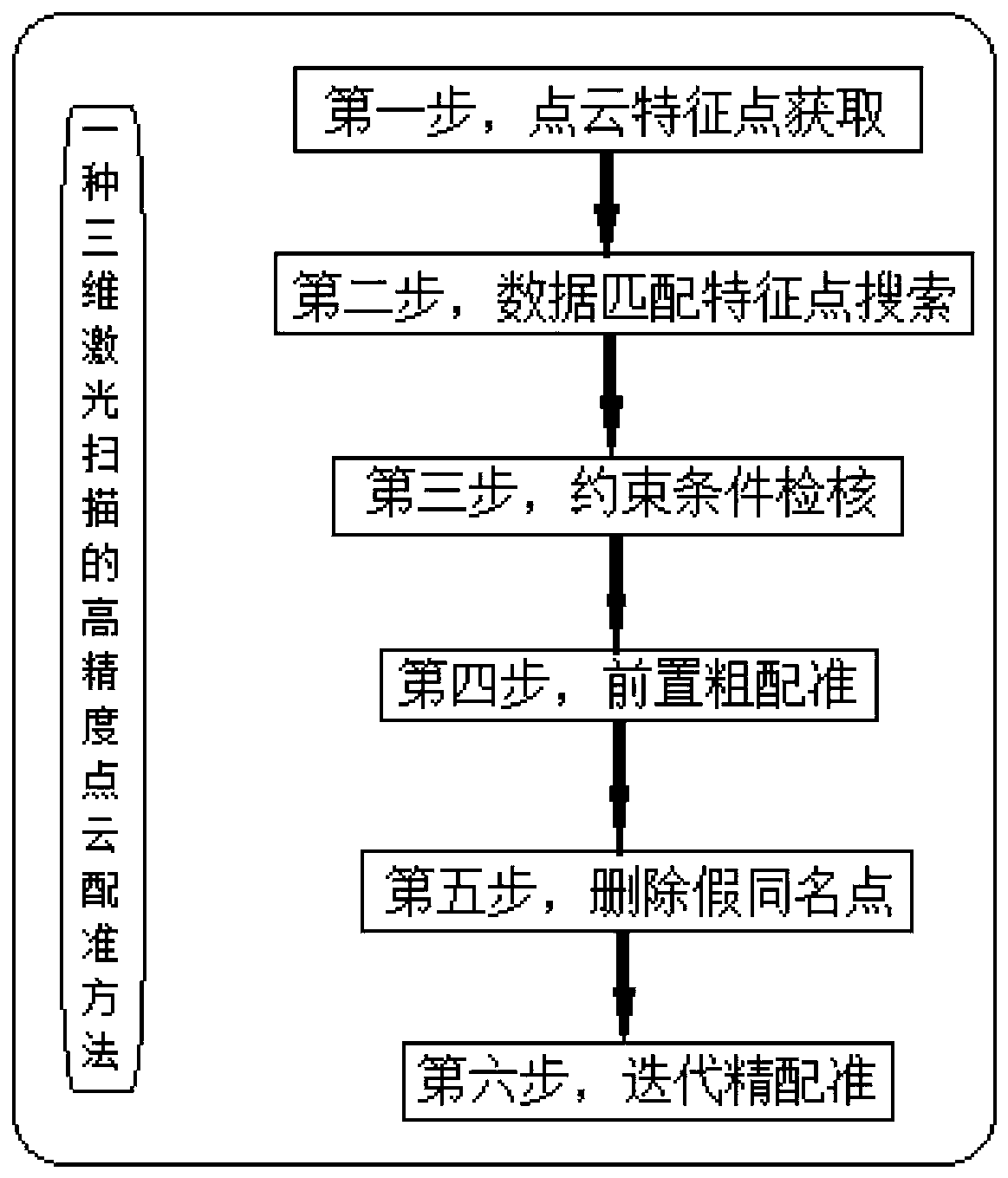
[0071] see figure 1 , a high-precision point cloud registration method for 3D laser scanning provided by the present invention, including point cloud feature point acquisition, data matching feature point search, constraint check, pre-coarse registration, deletion of false homonym points, iterative fine-tuning Registration, the pre-coarse registration only extracts key points for registration, and after the target to be registered is rotated and translated, the initial registration result is obtained. The pre-coarse registration does not require high registration accuracy, and only gives a more accurate The initial position not only meets the requirements of the closest ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More