

A motion modeling and parameter identification method for an airport runway inspection robot
A technology of robot movement and airport runway, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inaccurate models, ignoring internal force relations, approximate processing of unknown parameters, and affecting robot motion control, etc., to achieve modeling Effect of Accurate, Accurate System Models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in further detail below with reference to the accompanying drawings.
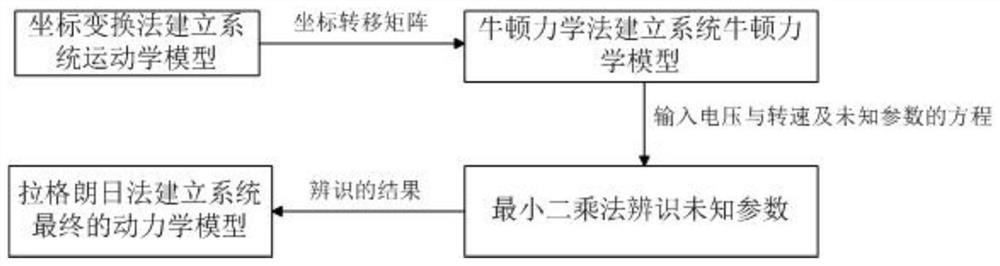
[0041] The invention relates to the field of robot motion modeling and parameter identification methods, in particular to the field of robot motion modeling and parameter identification methods based on airport runway detection. The invention designs a motion modeling and parameter identification method for an airport runway detection robot system, establishes the kinematic equation of the airport runway detection robot by using the coordinate transformation method, and obtains the coordinate system transfer matrix. Then use the least square method to identify the relevant unknown parameters, and finally use the Lagrangian method and combine the identified parameters to establish the dynamic model of the airport runway detection robot motion system. The design flow chart is as follows figure 1 shown.
[0042] A motion modeling method for an airport runway dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More