

A multi-motion mode ground/wall mobile robot
A mobile robot, multi-motion mode technology, applied in the field of robots, multi-motion mode mobile robots, can solve the problems of strong obstacle-crossing performance, weak obstacle-surmounting ability, complex control and drive, etc., to achieve easy operation and maintenance, high maneuverability, Highly flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in detail below with reference to the accompanying drawings and examples.
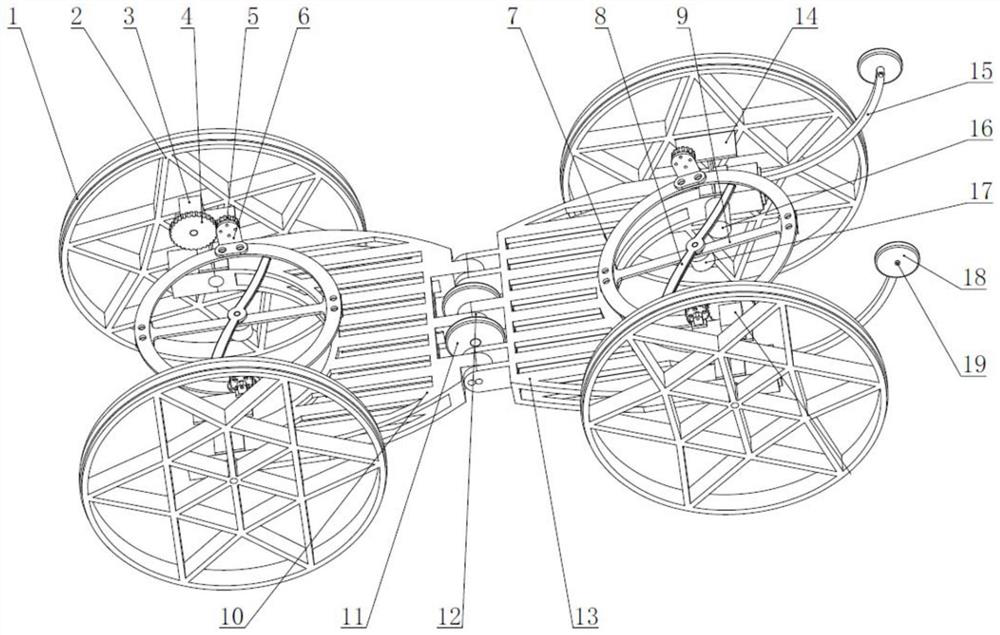
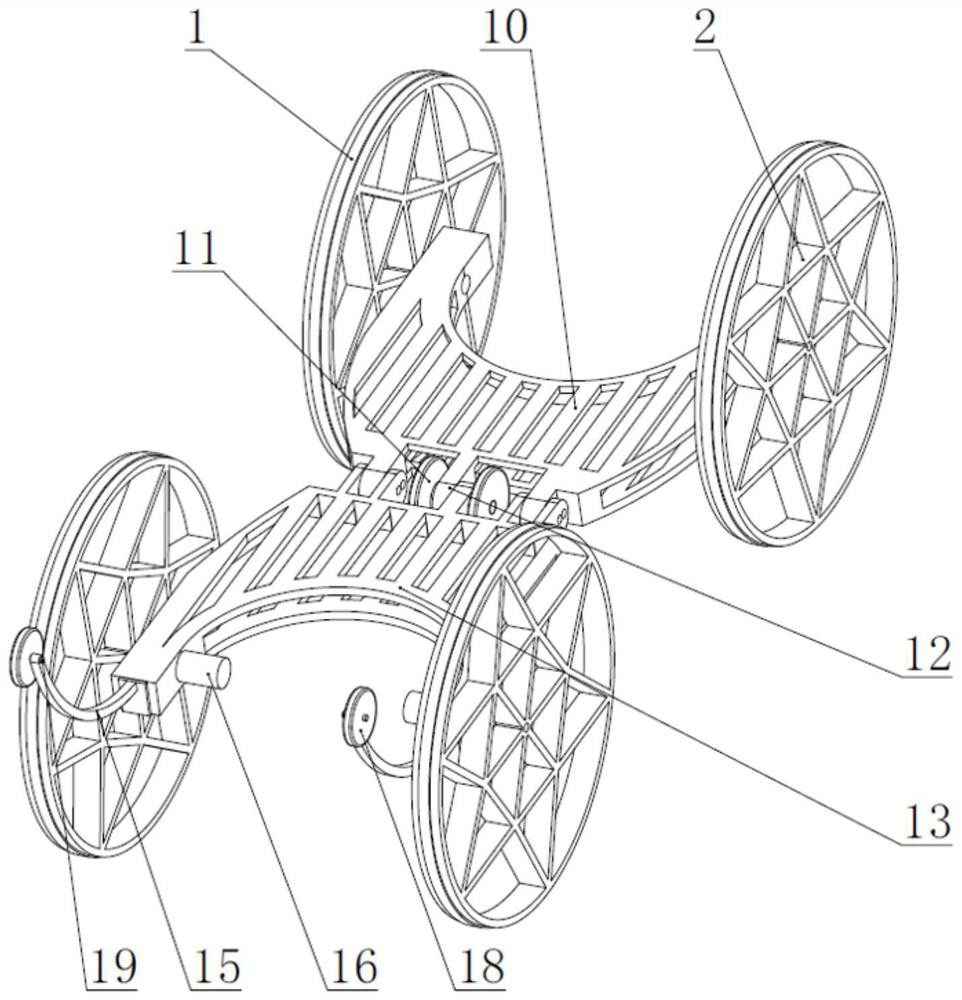
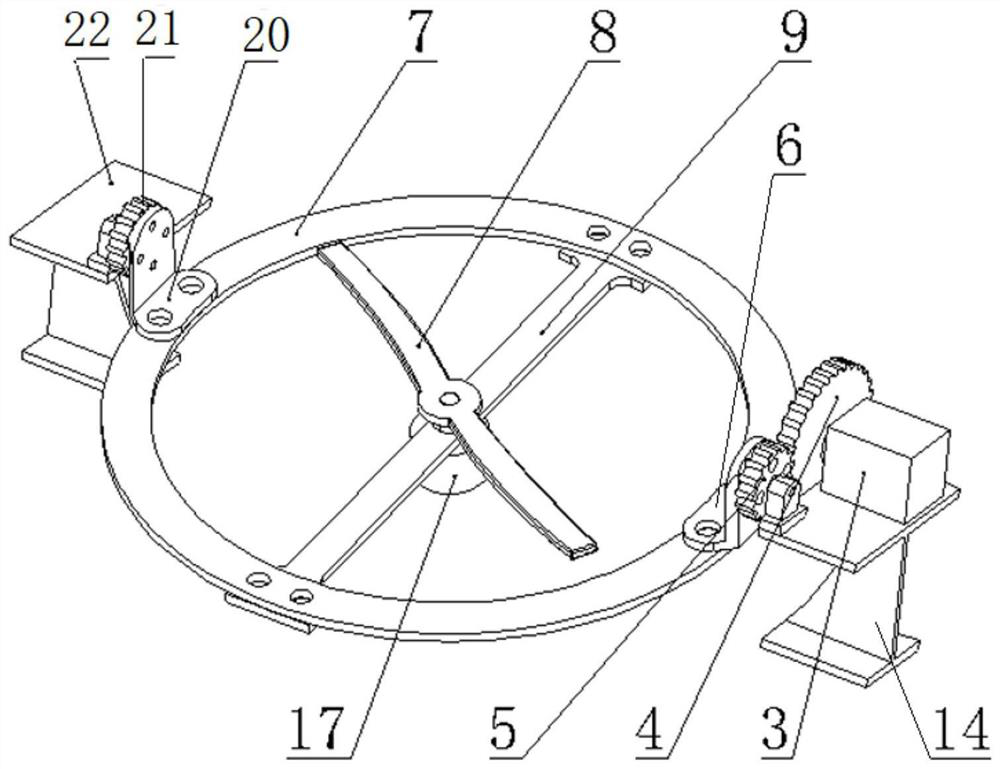
[0021] In order to solve the problems of slow speed, poor maneuverability, and no obstacle surmounting of traditional wall mobile robots, this embodiment provides a ground / wall mobile robot with multi-motion modes, which is a propeller anti-thrust adsorption, wheeled ground / wall mobile robot, namely The movement mode adopts the wheel structure, and the adsorption method adopts the propeller anti-thrust structure (the principle is: make the axis of the propeller form a certain angle with the wall, and the vertical component of the thrust of the propeller to the wall is used to balance the gravity), and has a high maneuverability of the wheel structure. It has a certain obstacle-surmounting performance when moving on the wall, and has a simple structure, low manufacturing cost, and is easy to operate and maintain.
[0022] The ground / wall mobile robot includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More