

Binocular VIO implementation method based on variational Bayesian adaptive algorithm
An adaptive algorithm and variational Bayesian technology, applied in the field of binocular visual inertial odometer, can solve problems such as large measurement, divergence, and uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
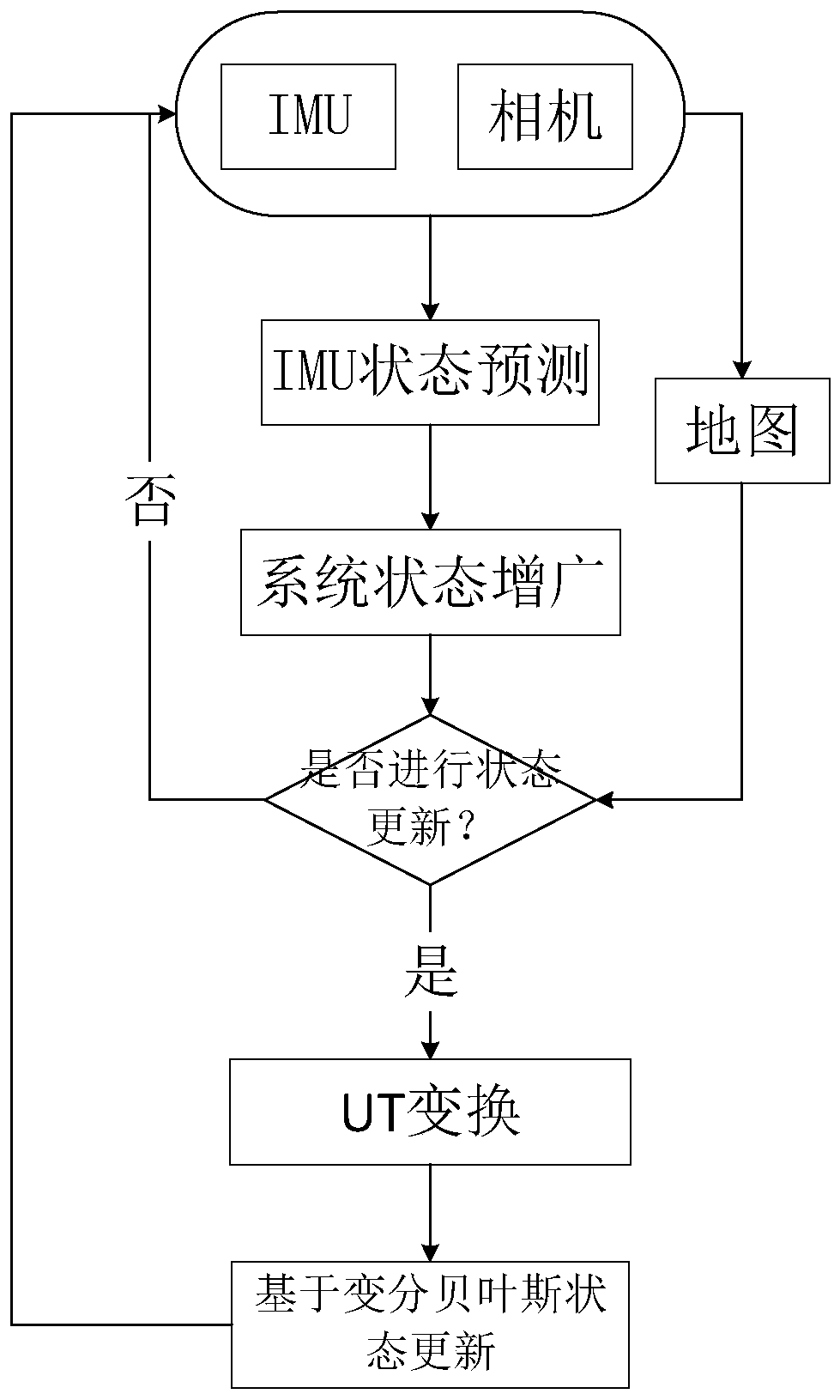
[0067] Aiming at the S-MSCKF system, the present invention proposes a VIO based on the adaptive algorithm of variational Bayesian, which enables the VIO system to deal with the situation that the covariance of the observation noise is unknown and time-varying. The influence of group points on the system, thus improving the robustness of the system. In addition, usually, the VIO system has strong nonlinearity, so the invention introduces an unscented transform (UT) to deal with the problems caused by the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More