Collaborative control method and system with obstacle avoidance and navigation tasks for multi-Euler-Lagrange system
A technology of collaborative control and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as difficulty in obtaining upper limit, overestimation of gain, etc., and achieve the effect of ensuring fast convergence and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0040] In one or more embodiments, a collaborative control method for a multi-Euler-Lagrange system with an obstacle avoidance escort task is disclosed, comprising the following steps:
[0041] The physical model of the convoy mission is described by the Douler-Lagrangian system; the physical model can be: multi-manipulator, multi-mobile robot, multi-pedal robot, multi-spacecraft, etc.; Grangian systems describe multiple mobile robot systems.
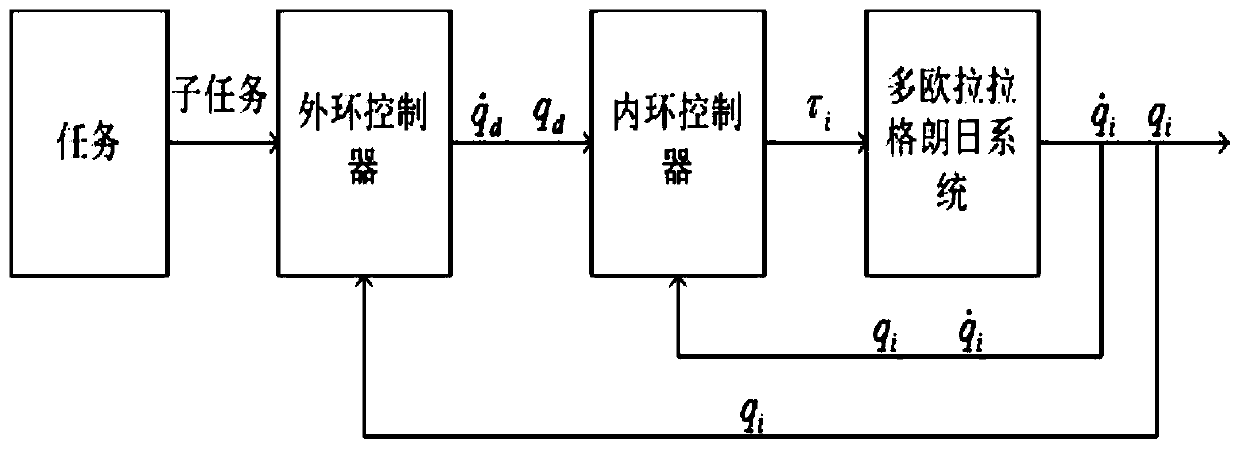
[0042] The controller adopts the inner and outer loop control structure, and the outer loop adopts the empty space behavior control framework considering obstacles to generate the expected speed and expected motion trajectory required by the physical model of the inner loop; the inner loop uses the adaptive proportional differential sliding mode control method, so that each The physics model tracks the desired velocity and desired trajectory (integrating the total desired velocity to get the desired trajectory).
[0043] 1. Consider a gr...
Embodiment 2
[0195] In one or more embodiments, a multi-Euler-Lagrangian system with a collaborative control system for obstacle avoidance escort tasks is disclosed, including: a controller, the controller adopts an inner and outer loop control structure, and the outer loop The empty space behavior control framework considering obstacles is used to generate the desired speed and desired motion trajectory required by the inner-loop physical model; the inner-loop applies the adaptive proportional differential sliding mode control method to make each physical model track the desired speed and desired motion trajectory.
Embodiment 3
[0197] In one or more embodiments, a terminal device is disclosed, which includes a processor and a computer-readable storage medium, the processor is used to implement instructions; the computer-readable storage medium is used to store multiple instructions, and the instructions are suitable for The cooperative control method of the Eulerian-Lagrangian system with obstacle avoidance escort tasks described in the first embodiment is loaded and executed by the processor.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com