

Online robot kinematics calibration method based on multi-sensor hybrid filter
A technology of robot kinematics and hybrid filters, applied in manipulators, program-controlled manipulators, navigation through speed/acceleration measurement, etc., can solve problems such as not starting from any position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be described in further detail below in conjunction with the examples, but the embodiments of the present invention are not limited thereto. If there are any points not described in detail below, those skilled in the art can realize or understand with reference to the prior art.
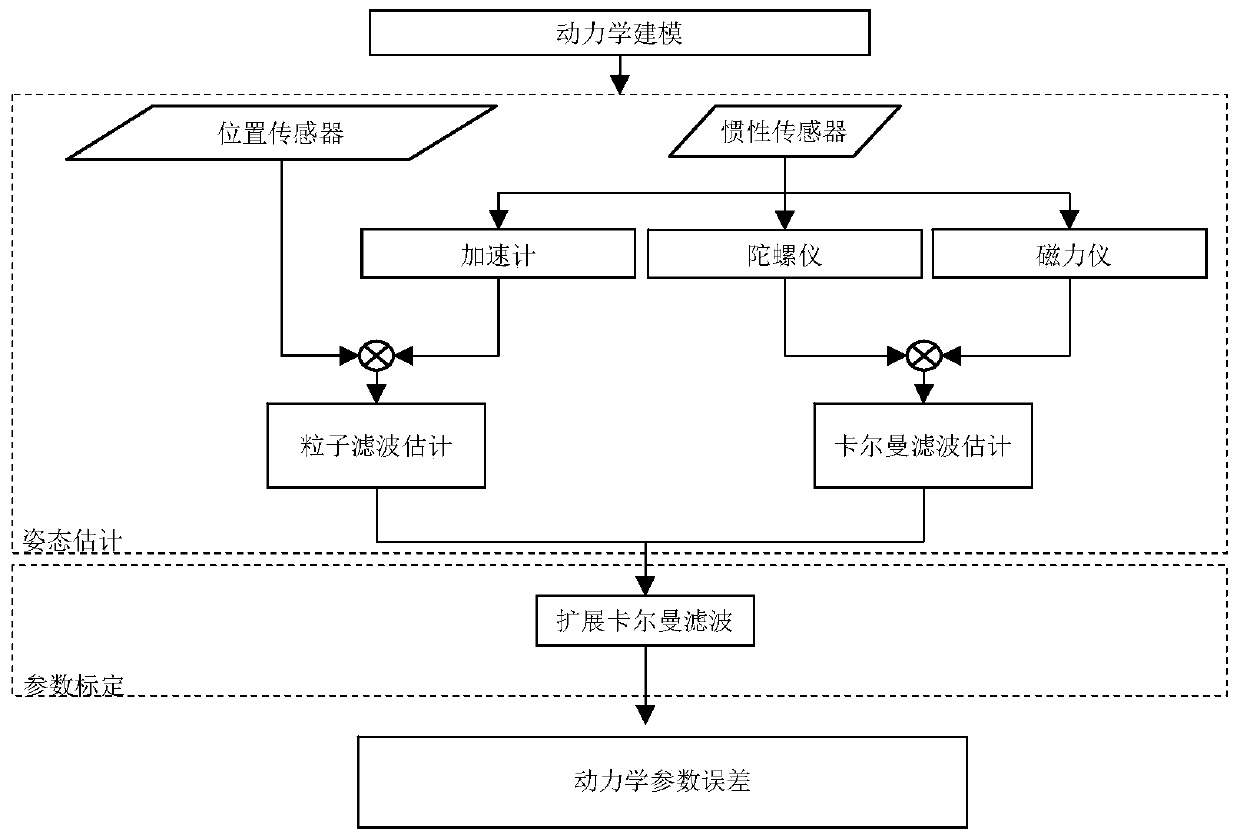
[0073] like figure 1 An online robot kinematics calibration method based on a multi-sensor hybrid filter is shown, including the following steps:
[0074] S1. Use inertial sensors and position sensors to measure the orientation and position of the robot end-effector
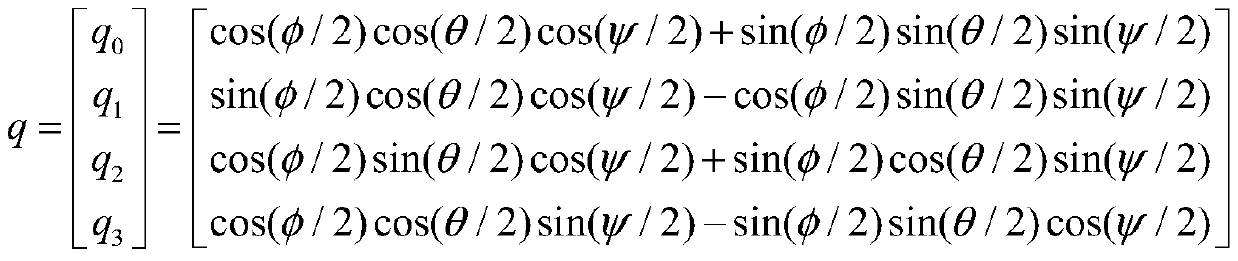
[0075] In order to measure the rotation angle of the robot end around the x, y and z axes, an inertial measurement unit is rigidly fixed to the robot end effector, and the inertial measurement unit includes a magnetometer, two gyroscopes and an accelerometer; And the factored quaternion algorithm (FQA) of the measurement data of the gravitational field to improve the accuracy of the estimation process....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More