

Air, water and underwater triphibious unmanned aerial vehicle
A technology of unmanned aerial vehicle and fuselage, applied in the field of unmanned aerial vehicle, can solve the problems such as restricting the application field and not being able to dive underwater, and achieve the effect of reducing resistance and improving navigation performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] This embodiment is an air-water diving amphibious drone.
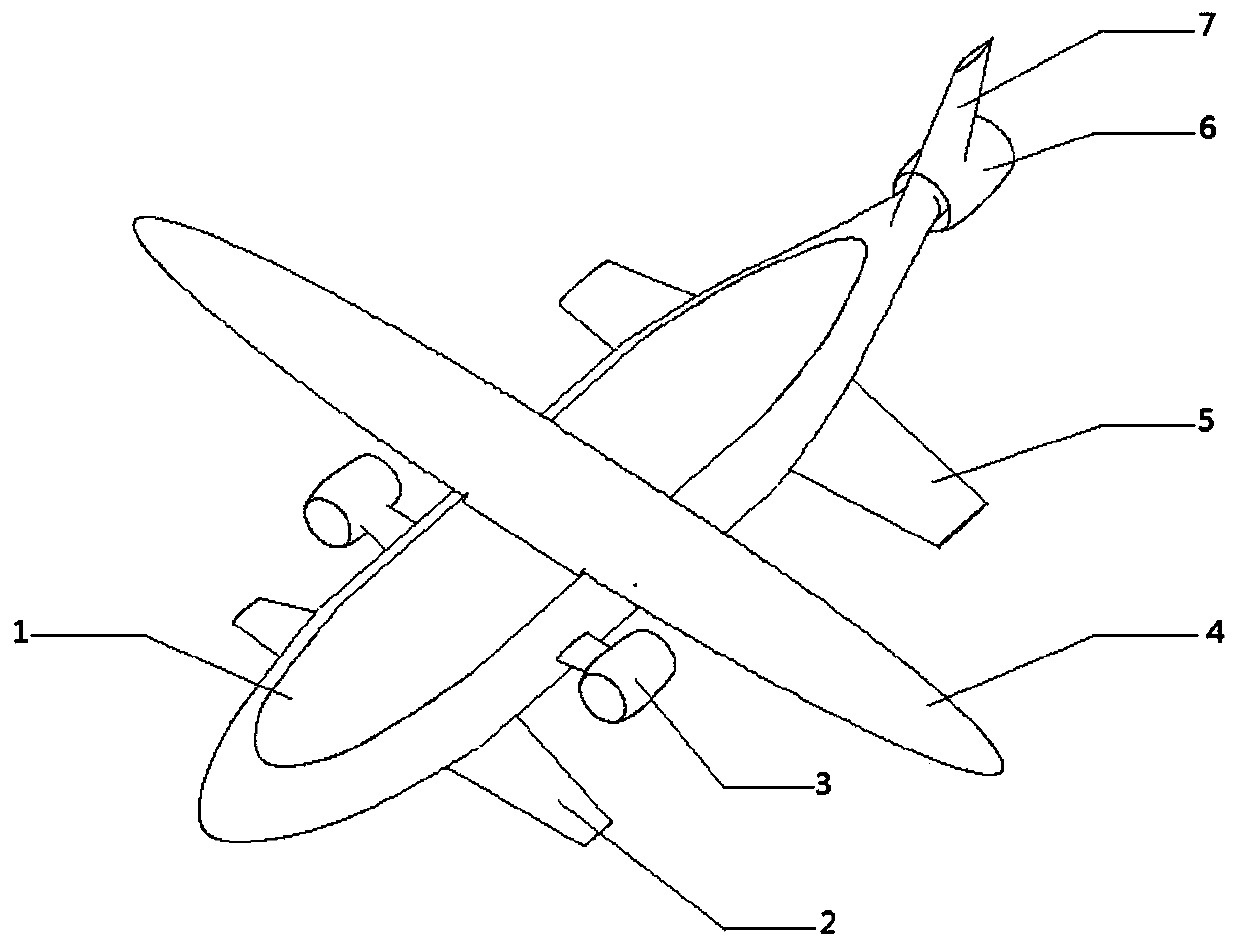
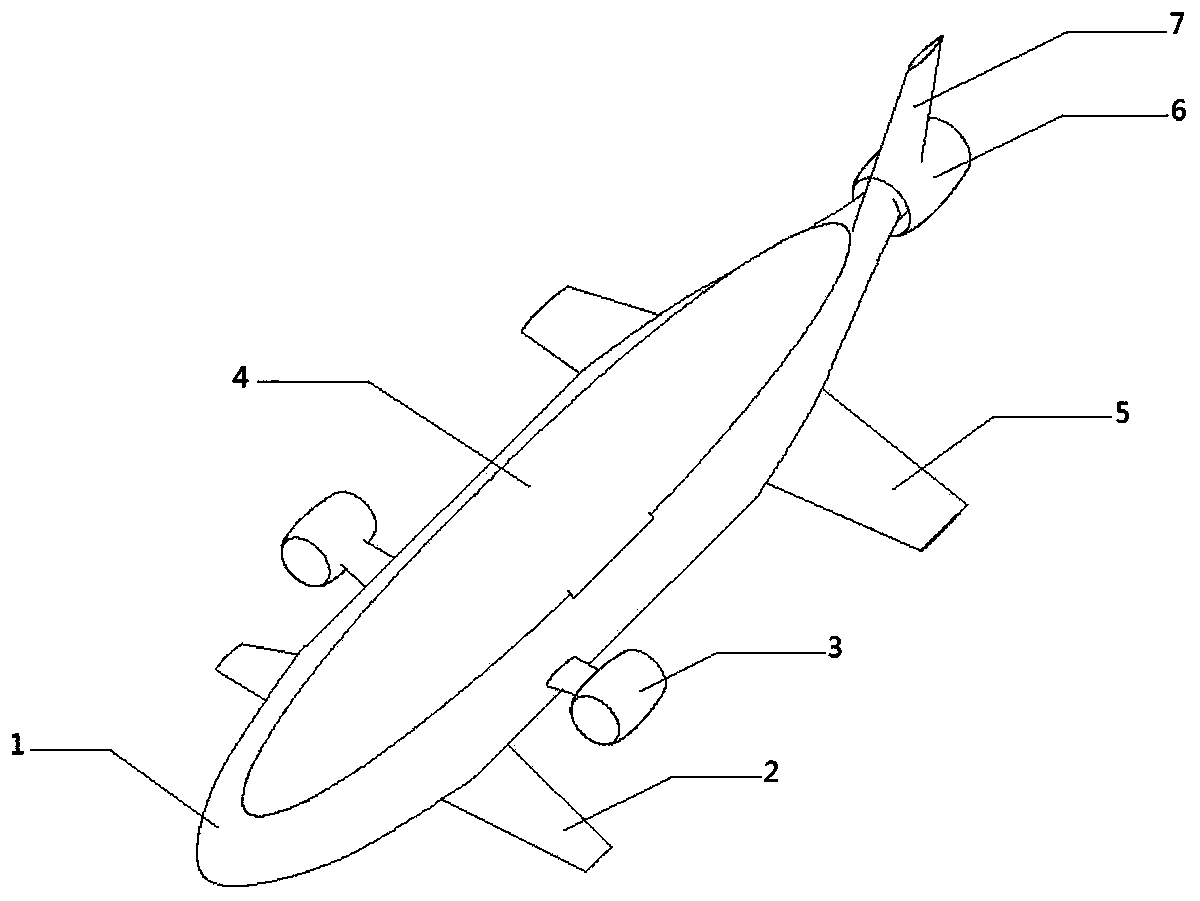
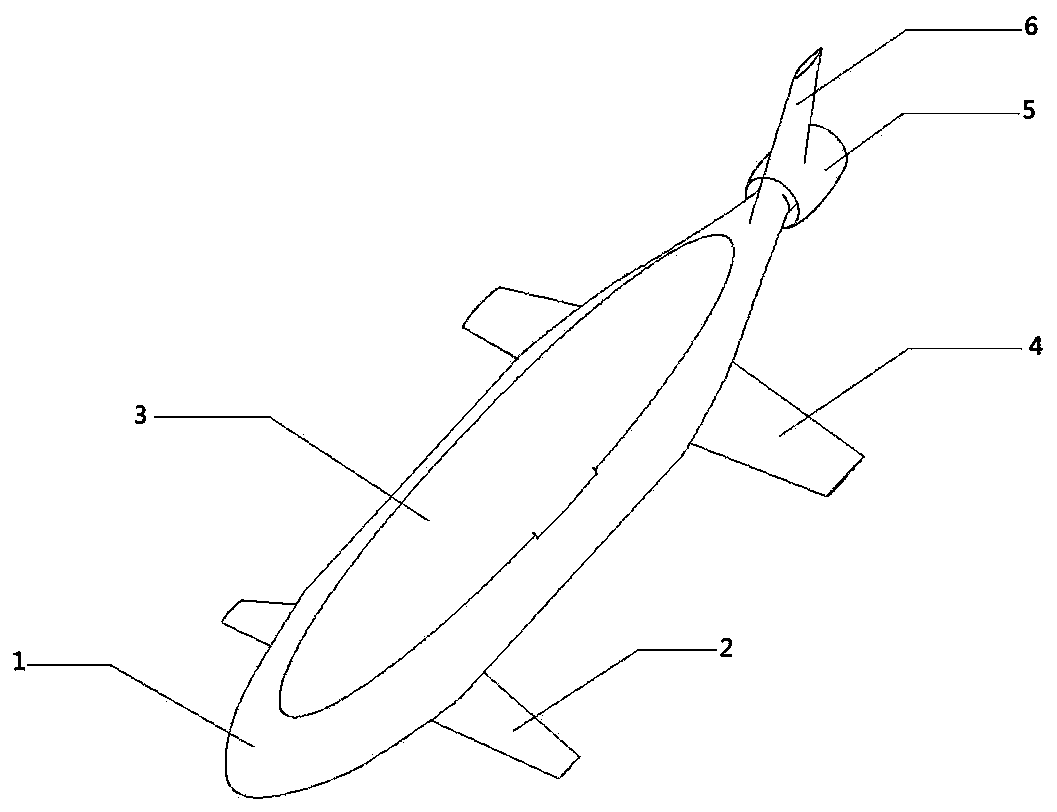
[0032] refer to Figure 1 ~ Figure 6c , the present embodiment air-water diving amphibious UAV is made up of fuselage 1, canard 2, ducted engine 3, rotatable wing 4, lower anti-horizontal tail 5, submersible propeller 6 and vertical tail 7; Wherein, wing 4. It is elliptical, and there is a deflector in the middle of the front side of the wing, which reduces the resistance of the UAV in flight mode. During navigation and submersion, the wing and the fuselage are integrated into a streamlined spindle. 1, both sides are provided with ducted engines 3, and the tail of the fuselage 1 is provided with a submersible propeller 6 and a vertical tail 7.
[0033] In this embodiment, the UAV mode conversion process includes take-off, landing, submerged and floating; when taking off, the UAV rotates the wings 4 by 90° to a vertical position with the fuselage 1 and locks them. Large, close to the center of gravity of the UA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More