

Method and system for adjusting steering angle of vehicle steering wheel and vehicle
A technology of steering wheel angle and adjustment method, applied in the adjustment method and system of the steering wheel angle of a vehicle, in the field of vehicles, can solve the problems of inconvenient operation, increase manual debugging work, etc., and achieve the effect of facilitating transplantation, improving flexibility, and eliminating complicated steps.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
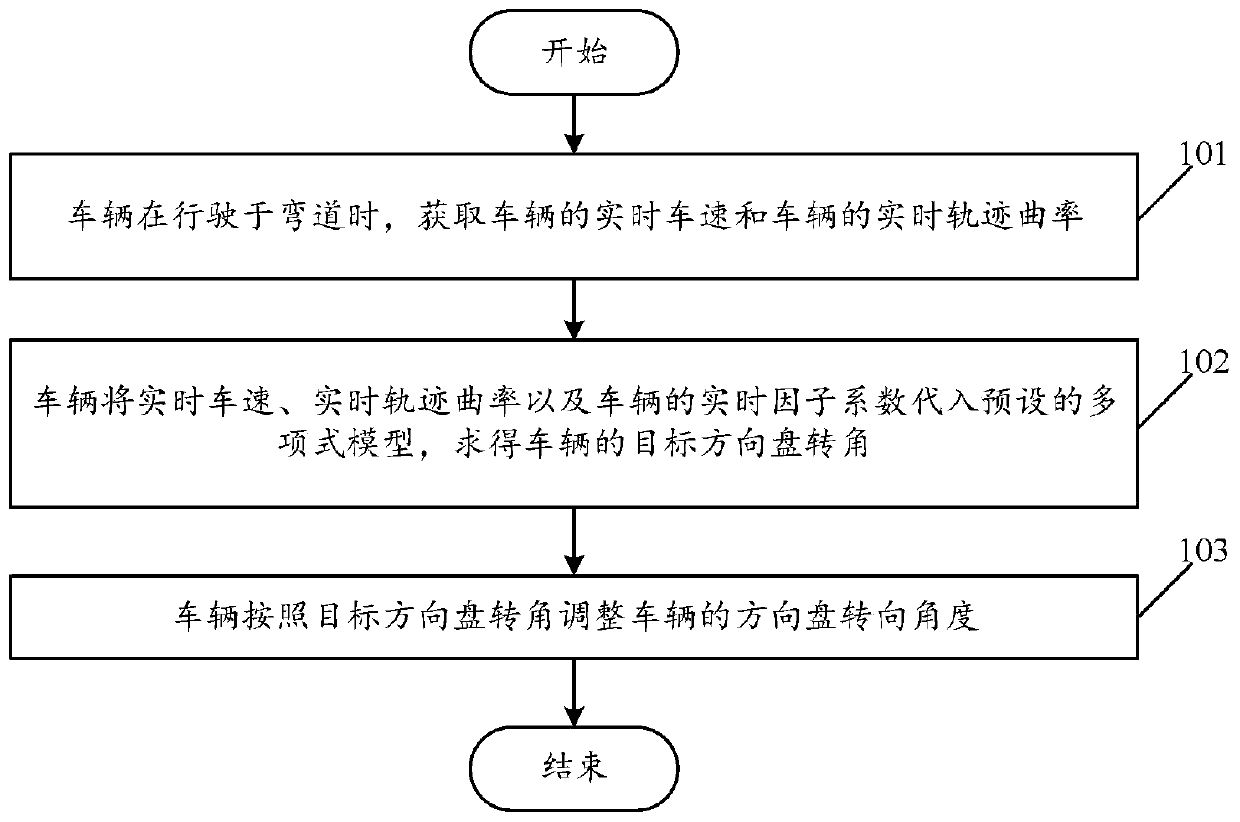
[0054] see figure 1 , figure 1 It is a schematic flowchart of a method for adjusting the steering wheel angle of a vehicle disclosed in an embodiment of the present invention. Such as figure 1 As shown, the method for adjusting the steering wheel angle of the vehicle is applied to the vehicle, and may specifically include the following steps.
[0055] 101. Acquire the real-time speed of the vehicle and the real-time trajectory curvature of the vehicle when the vehicle is driving on a curve.
[0056] In the embodiment of the present invention, the real-time vehicle speed is the vehicle speed acquired in real time by the wheel speed sensor when the vehicle turns, and the real-time trajectory curvature is the trajectory curvature calculated based on the real-time yaw rate and the real-time vehicle speed; wherein, the real-time yaw rate is the vehicle speed when the vehicle turns The yaw rate of the vehicle acquired in real time through the IMU does not specifically limit the a...
Embodiment 2
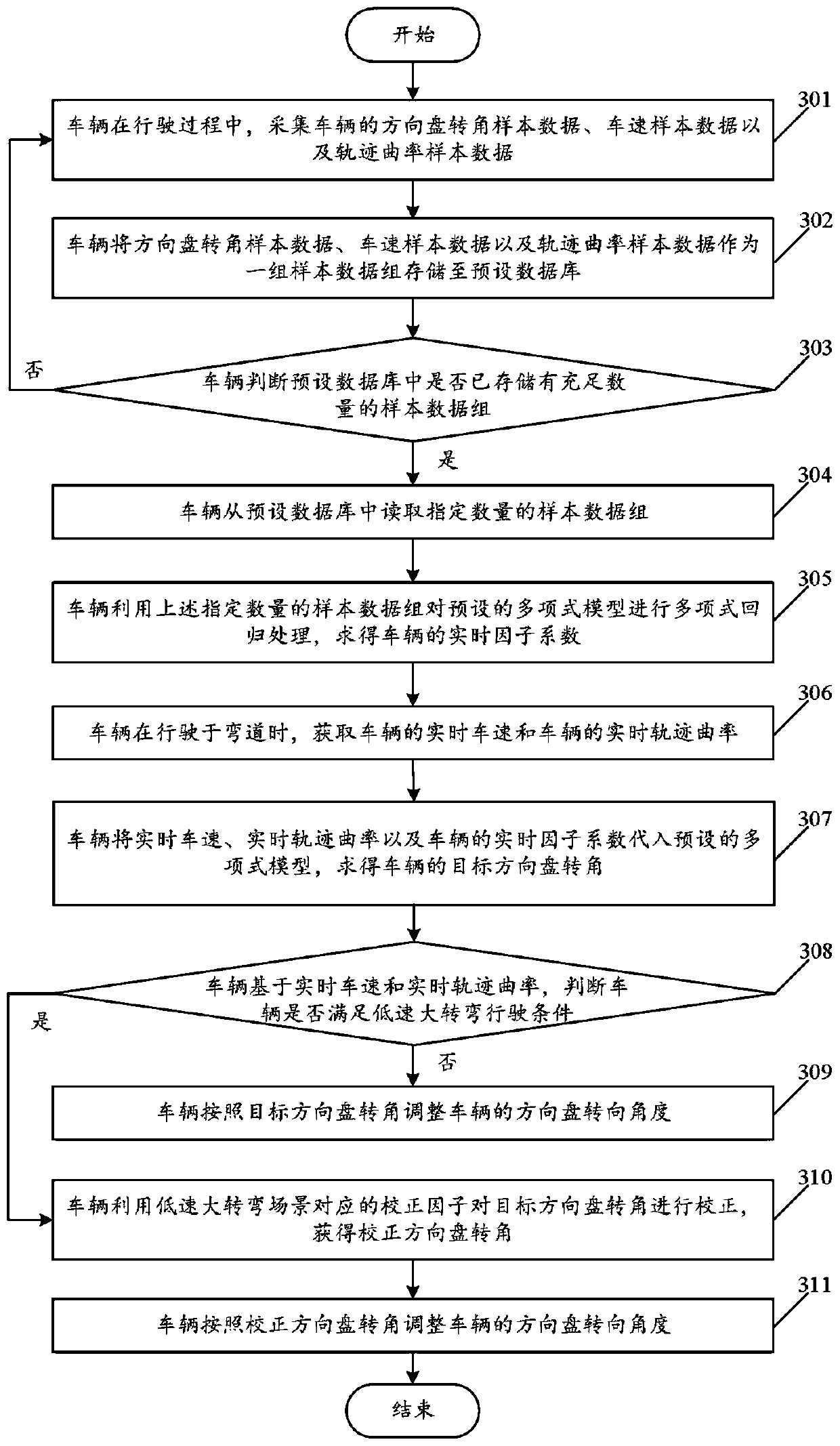
[0076] see image 3 , image 3 It is a schematic flowchart of another method for adjusting the steering wheel angle of a vehicle disclosed in the embodiment of the present invention. Such as image 3 As shown, the method for adjusting the steering wheel angle of the vehicle may include the following steps.
[0077] 301. During the driving process of the vehicle, collect the sample data of the steering wheel angle, the sample data of the vehicle speed and the sample data of the trajectory curvature of the vehicle.
[0078] In the embodiment of the present invention, the steering wheel angle sample data, vehicle speed sample data, and trajectory curvature sample data of the vehicle are the steering wheel steering angle, vehicle speed, and trajectory curvature collected at a certain data collection moment during the driving process of the vehicle, and the collection of each physical quantity For the manner, reference may be made to Embodiment 1, which will not be repeated here...
Embodiment 3
[0119] see Figure 4 , Figure 4 It is a structural schematic diagram of a vehicle steering wheel angle adjustment system disclosed in an embodiment of the present invention. The vehicle steering wheel angle adjustment system is applied to a vehicle so that the vehicle can perform figure 1 or image 3 Any method for adjusting the steering wheel angle of a vehicle. Such as Figure 4 As shown, the system for adjusting the steering wheel angle of the vehicle may include an acquisition unit 401, a first calculation unit 402, and an adjustment unit 403, wherein:
[0120] The acquisition unit 401 is configured to acquire the real-time speed of the vehicle and the real-time trajectory curvature of the vehicle when the vehicle is driving on a curve.
[0121] The first calculation unit 402 is used to substitute the real-time vehicle speed, the real-time trajectory curvature and the real-time factor coefficient of the vehicle into the preset polynomial model to obtain the target ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More