Virtual assembly method based on part geometric transformation information
A technology of virtual assembly and geometric transformation, applied in the field of virtual assembly, can solve the problems that affect the real-time performance of the simulation process, the lack of universality of simulation methods, and increase the time consumption of collision detection, so as to achieve good immersion and realism, and good universality. Practicality and practicality, the effect of guaranteeing authenticity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
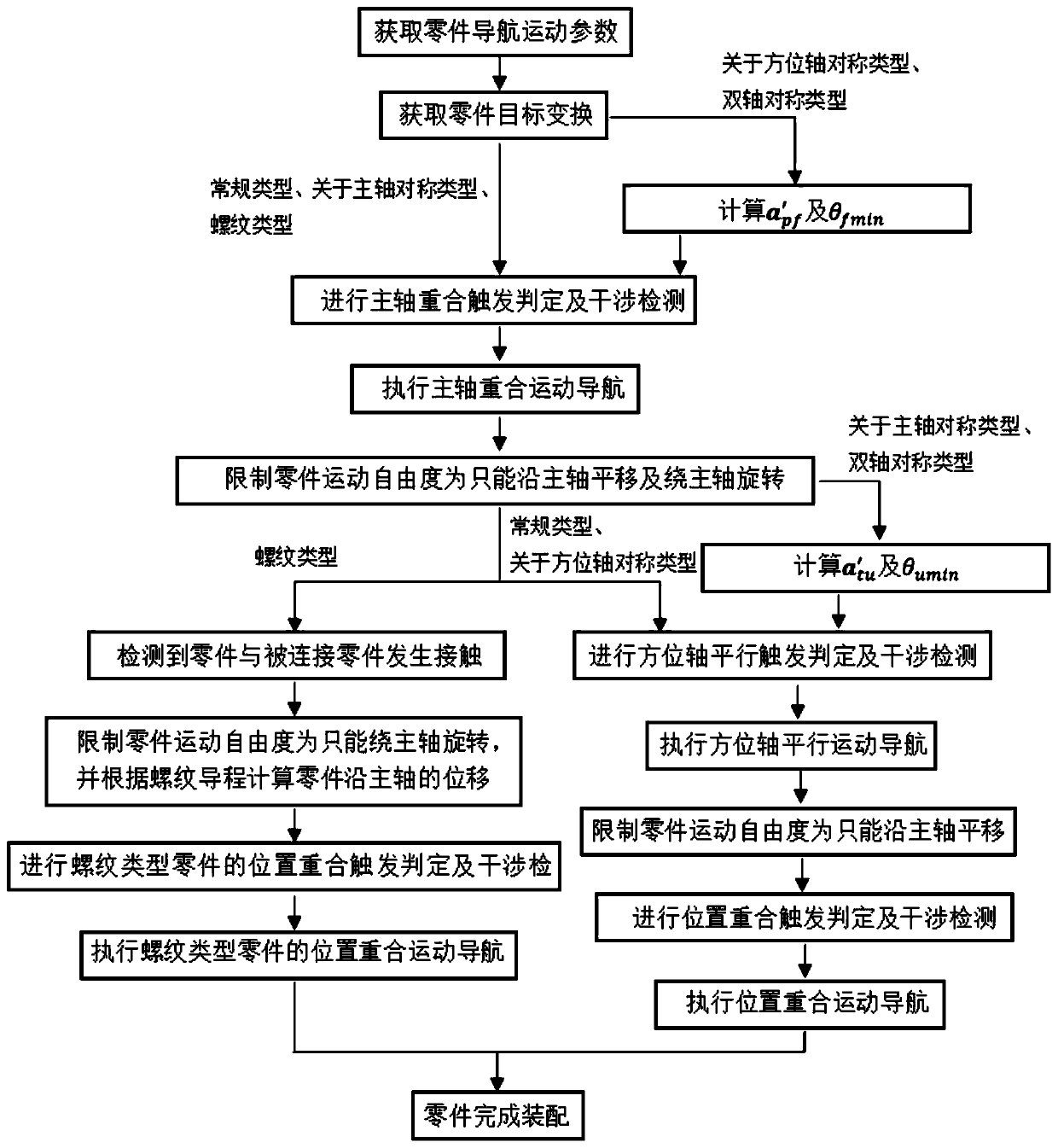
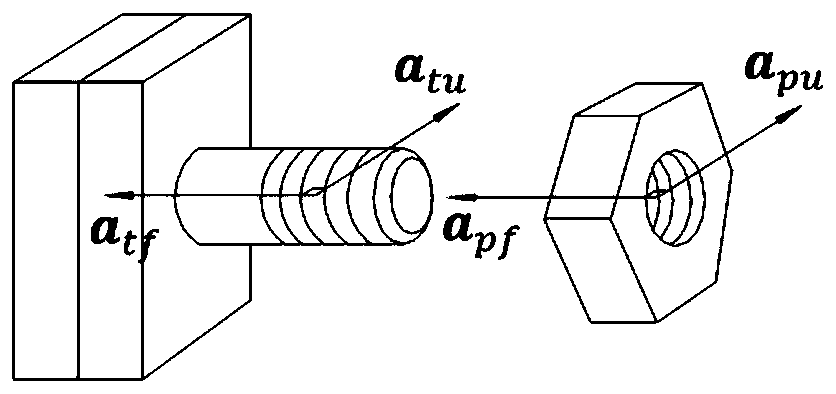
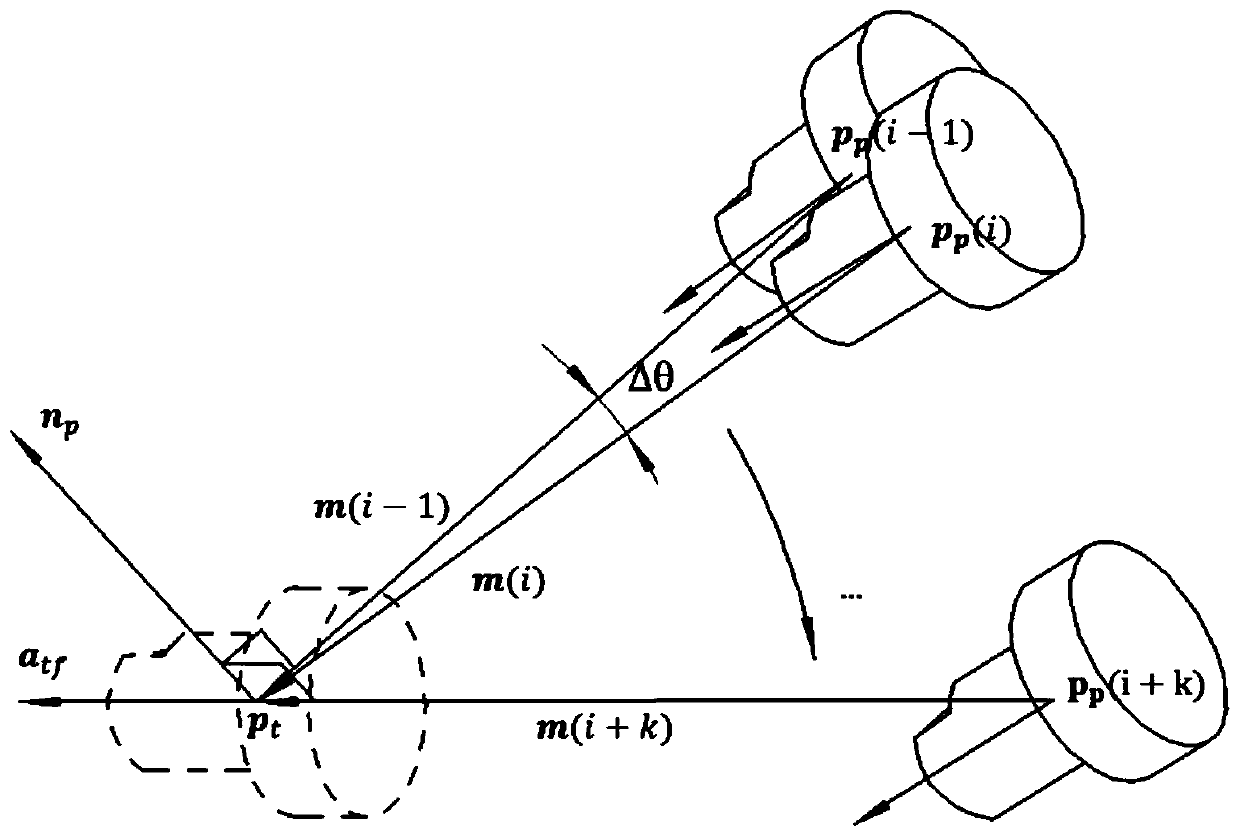
[0065] refer to Figure 1 to Figure 8 , a virtual assembly method based on the geometric transformation information of parts. The 3D digital model of the product assembly and assembly environment is drawn by commercial software such as CATIA and 3dsMax, but the tool software that can be used is not limited to this.
[0066] In addition to the application of existing and relatively mature simulation technologies such as parametric modeling, collision detection, and physical engines, the main functions of the content of the invention are realized by building four script components, which are: assembly information center Component AMC, part assembly information component PAM, assembly positioning execution component APA, interchange information exchange component IME. Here, the way of implementing the present invention based on the Unity engine so...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com