

Balance weight type rehabilitation robot for lower limbs
A technology for rehabilitation robots and lower limbs, which is applied to equipments to help people move around, physical therapy, etc. It can solve problems such as poor buffer support, longitudinal traction discount, training, etc., and achieve the effect of good buffering and reducing impact force.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
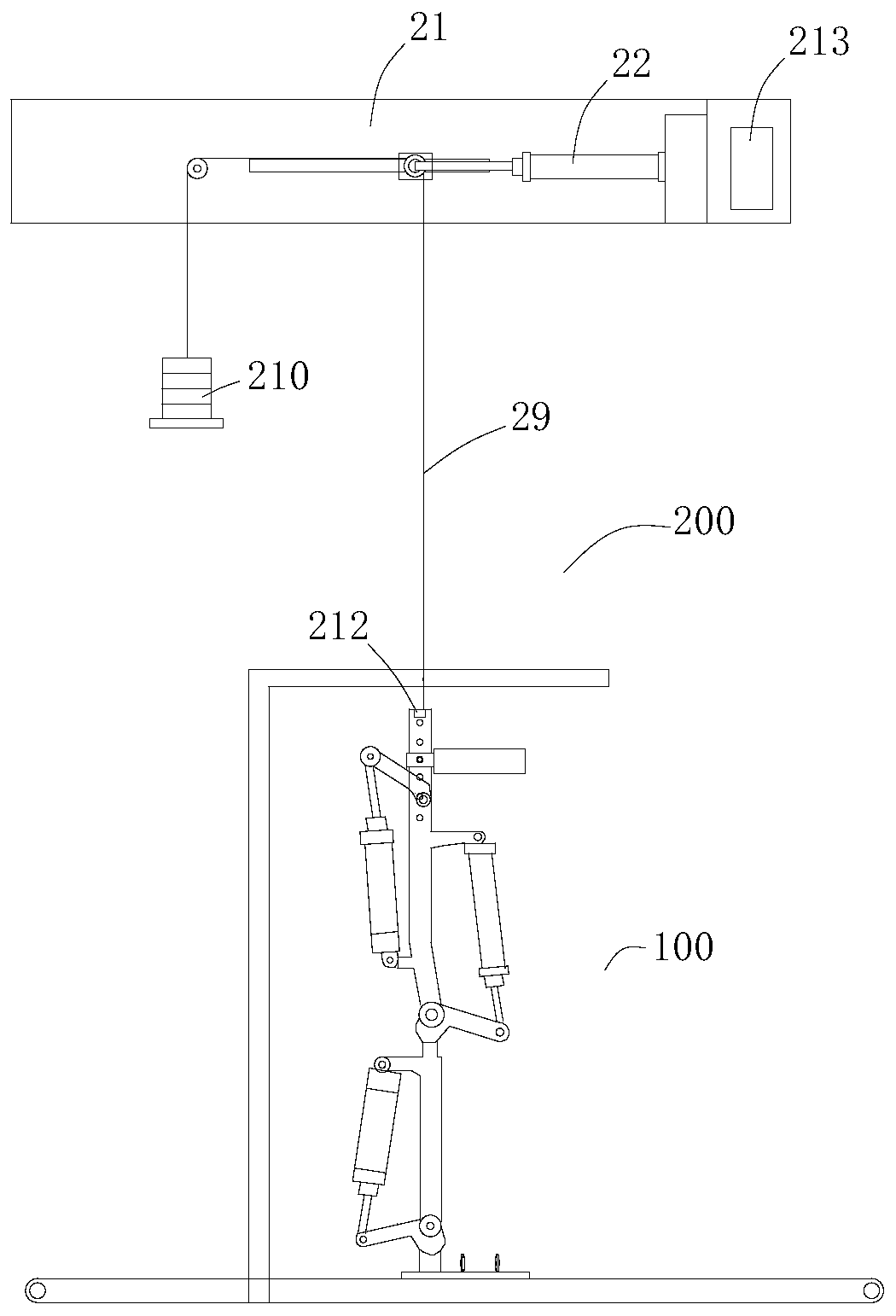
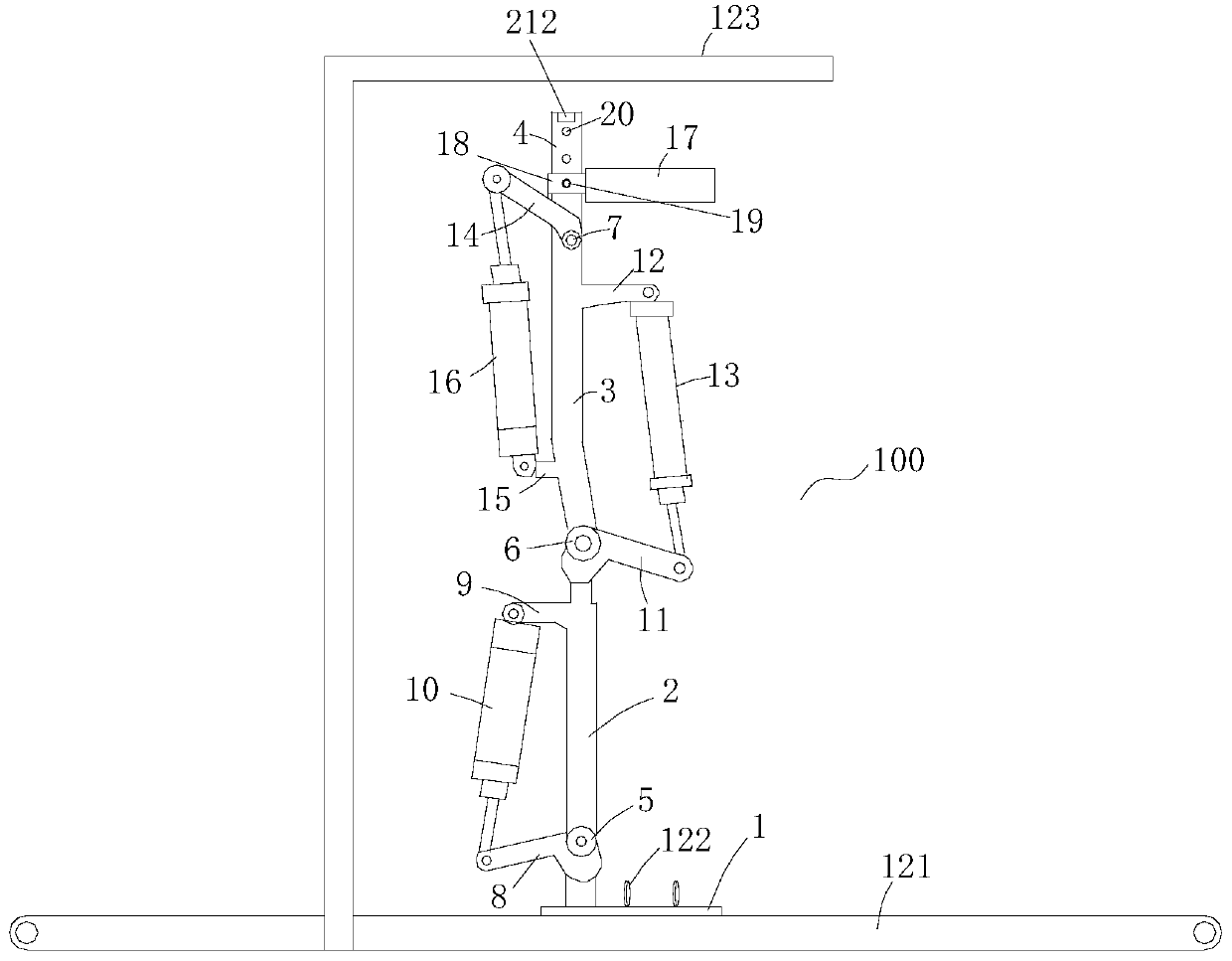
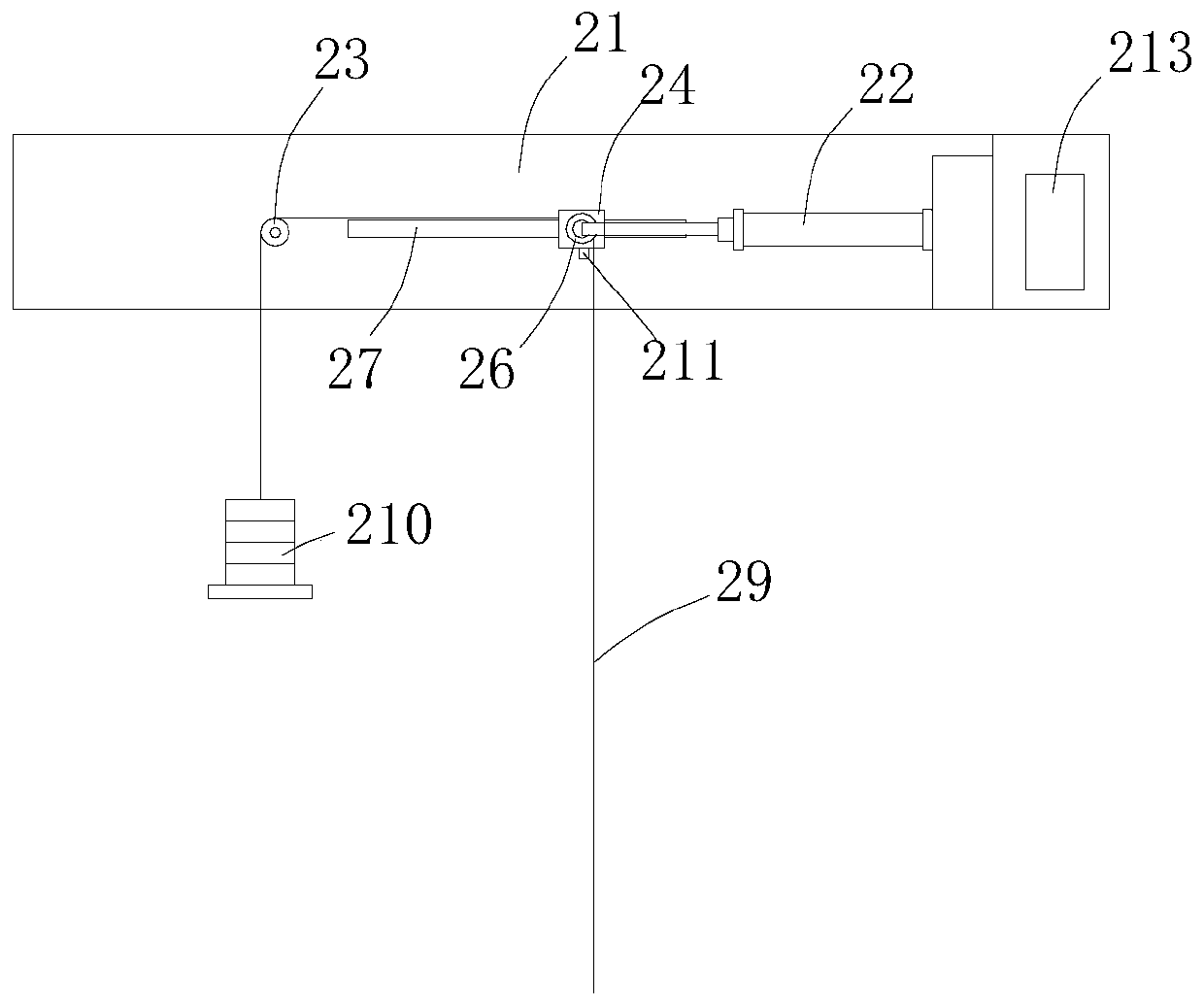
[0027] Such as Figure 1 to Figure 5 As shown, a counterweight type lower limb rehabilitation robot includes a gait training rehabilitation robot 100 and a weight reduction traction mechanism 200 arranged above the gait training rehabilitation robot 100. The gait training rehabilitation robot 100 includes a foot plate 1, and a foot plate 1 hinged calf bar 2, thigh bar 3 hinged with calf bar 2 and waist support plate 4 hinged with thigh bar 3, the hinge of foot plate 1 and calf bar 2 forms a machine ankle joint 5, calf bar 2 and thigh bar The hinge of 3 forms the machine knee joint 6, and the hinge of the thigh bar 3 and the waist support plate 4 forms the machine waist joint 7;
[0028] The end of the sole plate 1 is fixedly connected to the first support plate 8, and the calf bar 2 is fixedly connected to the second support plate 9. An ankle cushioning part 10 is installed between the first support plate 8 and the second support plate 9, and the two ankle cushioning parts 10 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More