

A method of workpiece grasping based on machine vision
A machine vision, workpiece technology, applied in instruments, manipulators, manufacturing tools, etc., can solve the problems of deformation of the outer contour of the workpiece, affecting robot clamping, reducing robot clamping efficiency, etc., to achieve a wide range of applications and improve clamping efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] In order to better understand the essence of the present invention, the present invention will be further described below in conjunction with specific embodiments and accompanying drawings.
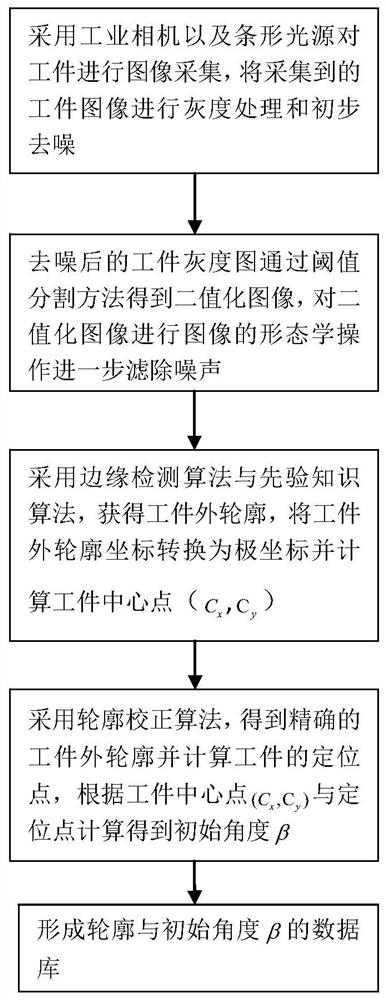
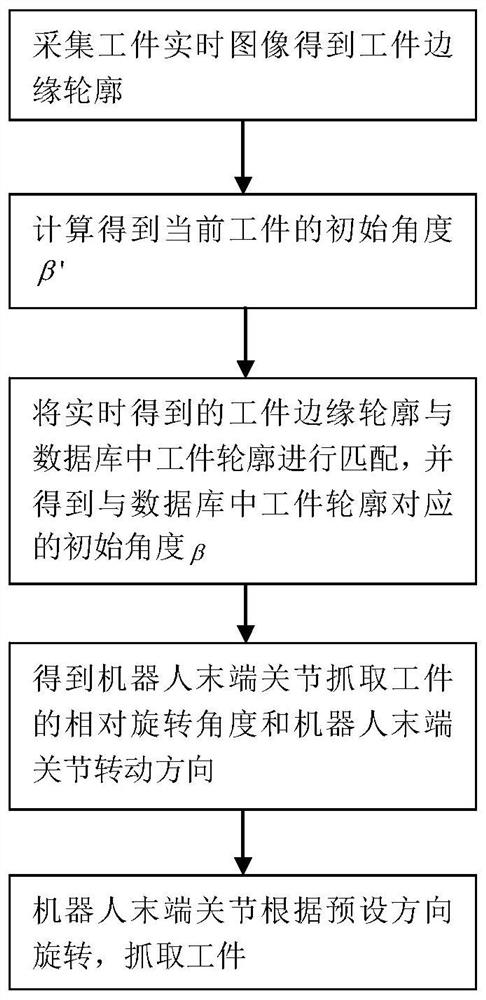
[0026] The invention discloses a workpiece grasping method based on machine vision, which is suitable for the technical field of industrial robot grasping. The specific steps are as follows: figure 1 , figure 2 Shown:
[0027] Step 1: Use an industrial camera and a strip light source to collect images of the workpiece, and perform grayscale processing on the collected workpiece images to obtain a grayscale image of the workpiece, as shown in image 3 shown. Gaussian blurring is used to denoise the grayscale image of the workpiece. The grayscale image of the workpiece after denoising is obtained by the threshold segmentation method to obtain a binary image, and the image morphology operation is performed on the obtained binary image to further filter the noise. Using the edge d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More