

Double-arm operation type flight robot system for valve screwing and method
A technology for flying robots and aircraft, applied in the field of non-collinear inclined six-rotor aircraft facing the valve screwing operation system field, can solve problems such as underactuation, improve fault tolerance and stability, solve underactuation problems, and increase stability Effects on sex and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and examples.
[0045] The invention aims at the characteristics of strong stability and high reliability when the multi-rotor UAV interacts with the physical environment and the task requirements of turning the valve in nuclear power disaster relief. The invention uses a non-collinear inclined six-rotor aircraft to implement For the valve screwing task, the fault tolerance and stability of the system are greatly improved, which solves the underactuation problem of the traditional multi-rotor UAV, and increases the stability and flexibility when screwing the valve.
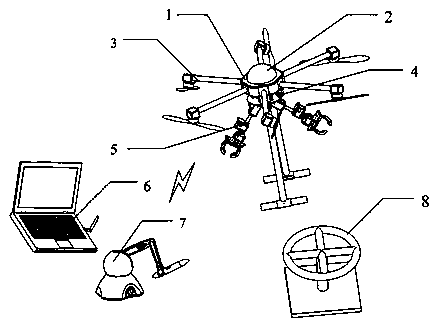
[0046] Such as figure 1 As shown, this embodiment discloses a dual-arm operating flying robot system for valve screwing, including a non-collinear tilting hexacopter, an operating device, and a main-end human-machine interface device.
[0047] The non-collinear inclined six-rotor a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More