

UKF (unscented Kalman filter)-based alignment method for inertia/polarized light integrated navigation system under large misalignment angle
A technology of integrated navigation system and large misalignment angle, which is applied in the field of UKF alignment of inertial/polarized light integrated navigation system under large misalignment angle, which can solve the problem of unsatisfactory alignment effect, unsatisfactory eastward gyro drift, and high price And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0110] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
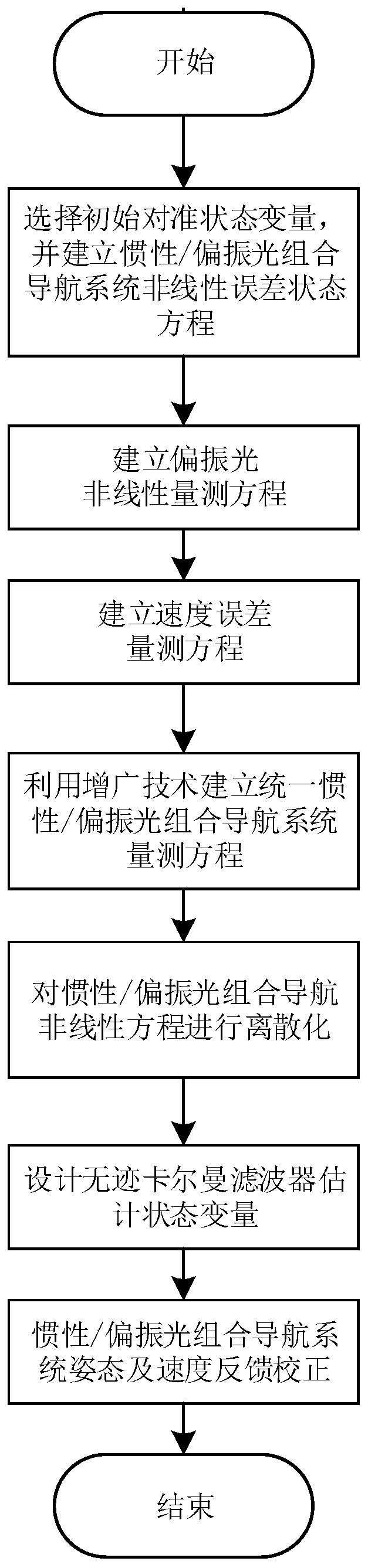
[0111] Such as figure 1 Shown, the specific implementation steps of the present invention are as follows:
[0112] The first step is to select the misalignment angle, velocity error, gyro drift and accelerometer constant bias as the state vector of the inertial / polarized light integrated navigation system, and establish the initial alignment of the inertial / polarized light integrated navigation system under a large misalignment angle Nonlinear error state equation. The state vector of the initial alignment of the selected inertial / polarized light integrated navigation system is:
[0113]
[0114] Among them, φ E , φ N and φ U are respectively the misalignment angles of the eastward, northward and celestial directions in the navigation coordinate system n, expressed as the error angle between the calculated navigation coordinate system n′ and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More