

Monocular image-oriented three-dimensional object detection method based on three-dimensional reconstruction
A technology of 3D object and 3D reconstruction, applied in the field of image processing and computer vision, to achieve the effect of improving detection performance, good scalability, and realizing 3D detection tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The specific implementation manners of the present invention will be further described below in conjunction with the accompanying drawings and technical solutions.
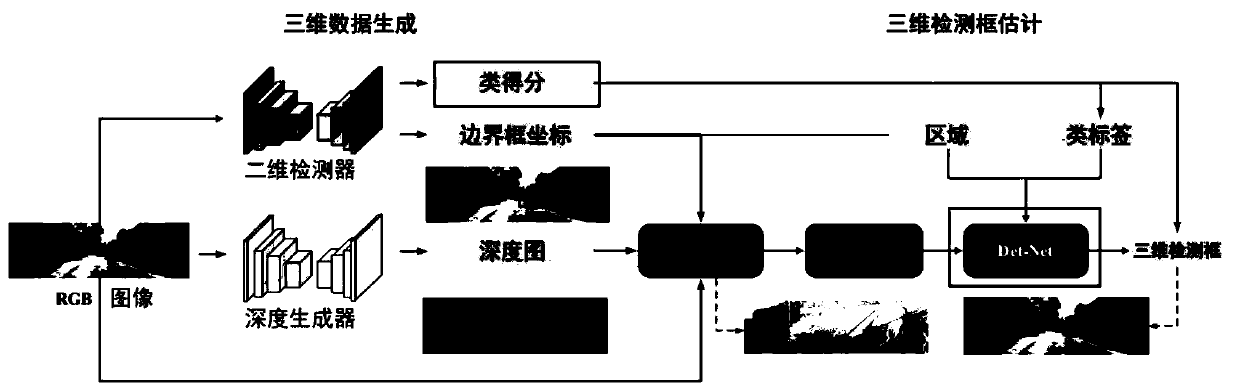
[0051] The present invention uses the pictures acquired by the monocular camera as the sensor as the data, and on this basis, uses the two-dimensional detector and the sparse depth map inferred by CNN's depth prediction and feature method to restore the depth information and establish three-dimensional point cloud data. The implementation process of the whole method is as follows figure 1 As shown, the method includes the following steps:
[0052] 1) First, two CNN networks are used to convolve the RGB image to obtain the approximate position and depth information of the object.
[0053] 1-1) Two-dimensional detector, use the CNN two-dimensional detector to detect and determine the object in the RGB image, and output the score (Class Score) of the detected object category and the coordinates of the two-dim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More