

Servosystem position tracking control method based on hybrid sliding mode control
A technology of servo system and tracking control, applied in general control system, control/adjustment system, program control, etc., can solve problems such as no research, achieve the effect of improving control accuracy and overcoming chattering problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0011] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings, so that those skilled in the art can better understand the present invention. It should be noted that in the following description, when detailed descriptions of known functions and designs may dilute the main content of the present invention, these descriptions will be omitted here.
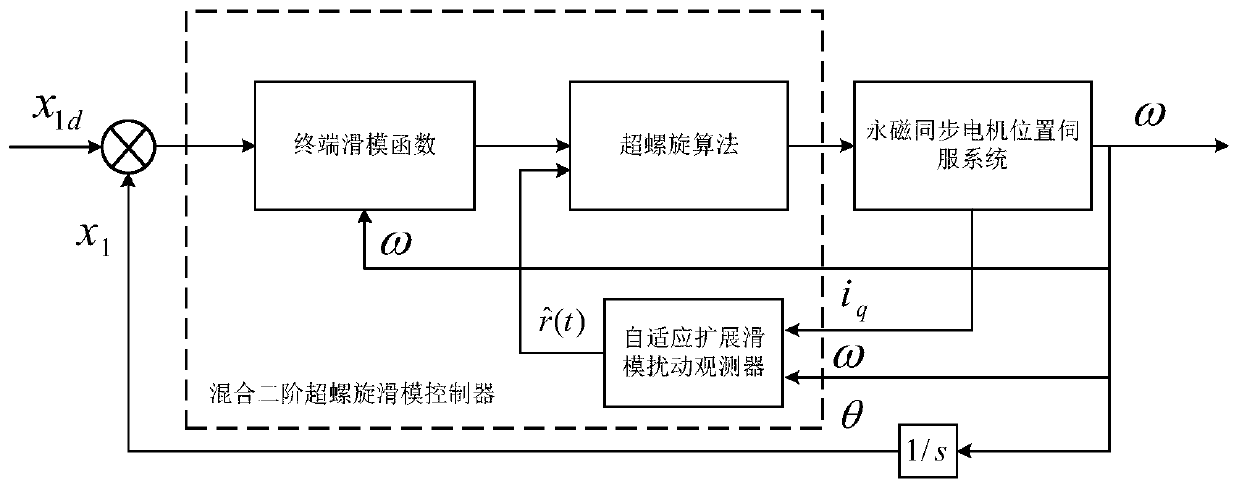
[0012] Considering the parameter drift of the permanent magnet synchronous motor and the uncertainty of the load torque disturbance, the parameter drift and the uncertainty of the load torque are regarded as the lumped disturbance r(t), and the speed of the permanent magnet synchronous motor with the lumped disturbance is established Model. Add the equation to the motor speed equation considering the lumped disturbance That is, the position servo model is established. Here, x 1 (t) = θ represents the electronic rotor position, x 2 (t) = ω represents the mechanical angu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More