

Small robot indoor passable area obtaining method and device
A technology for traffic areas and robots, applied in the field of scene modeling, can solve problems such as weak computing power, poor scene performance, and low viewing angle, and achieve the effects of low equipment cost, good real-time performance, and dense modeling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
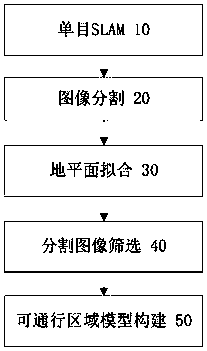
[0039] Such as figure 1 As shown, the method for modeling the indoor passable area of a small robot of the present invention includes the following steps:
[0040] (10) Monocular SLAM: Use the monocular camera on the robot to obtain indoor environment images, input them into the monocular SLAM system, and obtain the pose and sparse feature point cloud of the camera;
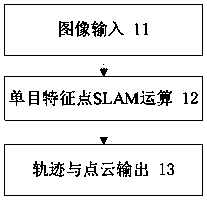
[0041] Such as figure 2 As shown, the (10) monocular SLAM steps include:
[0042] (11) Image input: Obtain continuous input images from the camera and input them into the monocular feature point SLAM system;
[0043] (12) Monocular feature point SLAM calculation: the system uses the matching of feature points between images to calculate the camera pose and the spatial position of feature points, and at the same time optimize the results through local beam set adjustment and loopback optimization thread;
[0044] (13) Trajectory and point cloud output: The monocular SLAM system outputs the pose of the camera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More