

Adaptive control method for driving
A technology for adaptive control and driving data, applied in neural learning methods, biological neural network models, neural architectures, etc., can solve complex and changeable, unable to cover a wide enough range of scenes, and reduce robustness and adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to further illustrate the features of the present invention, please refer to the following detailed description and accompanying drawings of the present invention. The accompanying drawings are for reference and description only, and are not intended to limit the protection scope of the present invention.
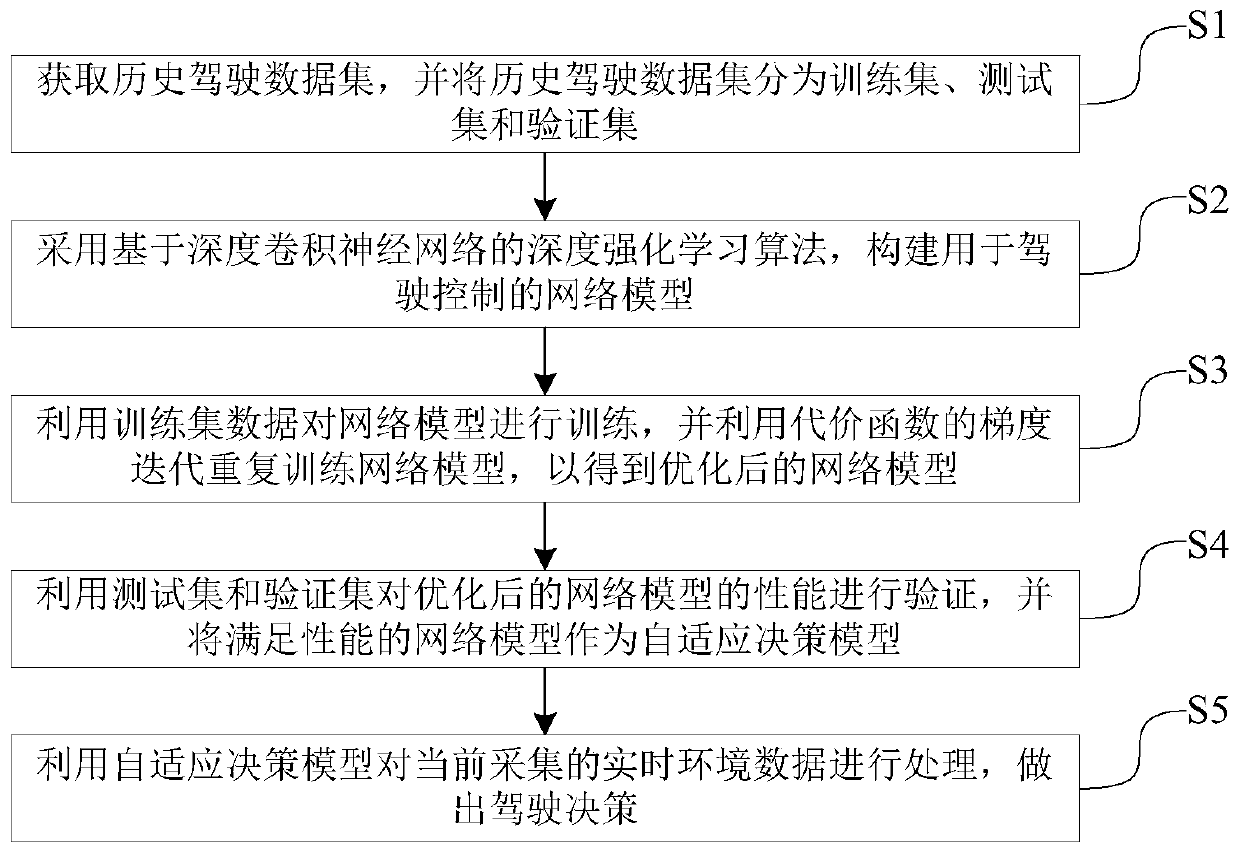
[0052] like figure 1 As shown, this embodiment discloses a driving adaptive control method, including the following steps S1 to S5:
[0053] S1, obtain the historical driving data set, and divide the historical driving data set into a training set, a test set and a verification set;
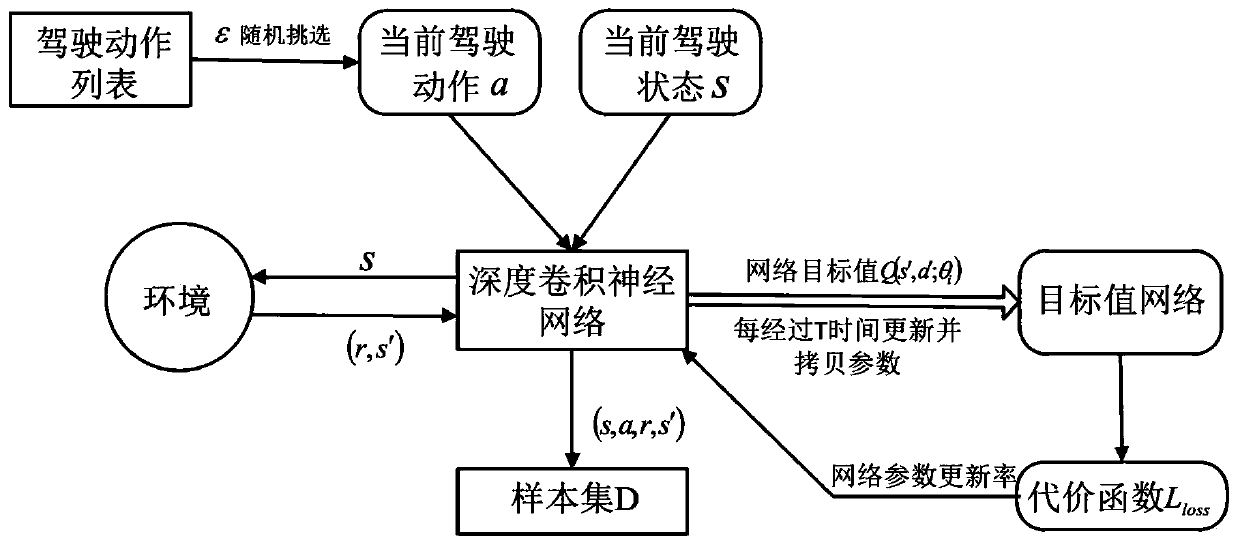
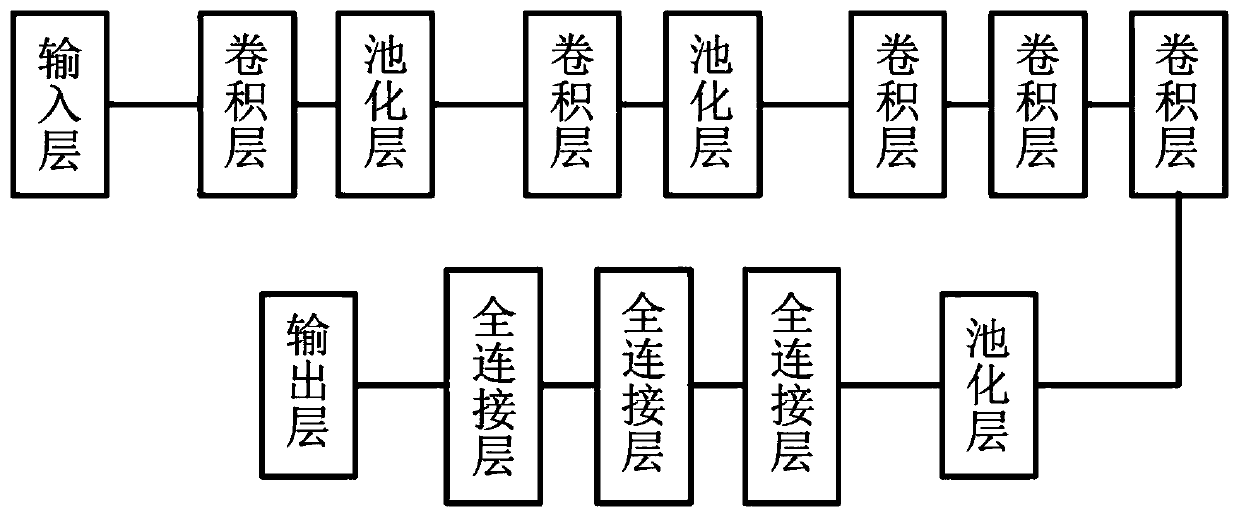
[0054] S2. Using deep reinforcement learning algorithms based on deep convolutional neural networks to construct a network model for driving control;
[0055] S3. Use the training set data to train the network model, and use the gradient of the cost function to iteratively and repeatedly train the network model to obtain an optimized network model;
[0056] S4. Use the test ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More