

Handle for moving trolley of surgical robot
A technology of surgical robot and mobile trolley, which is applied in the field of the handle of the surgical robot mobile trolley, which can solve the problems of inconvenient pushing in reverse, occupation of work space, and inconvenience of surgical staff, so as to achieve simple and convenient operation, easy forward and backward, and convenient The effect of using
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
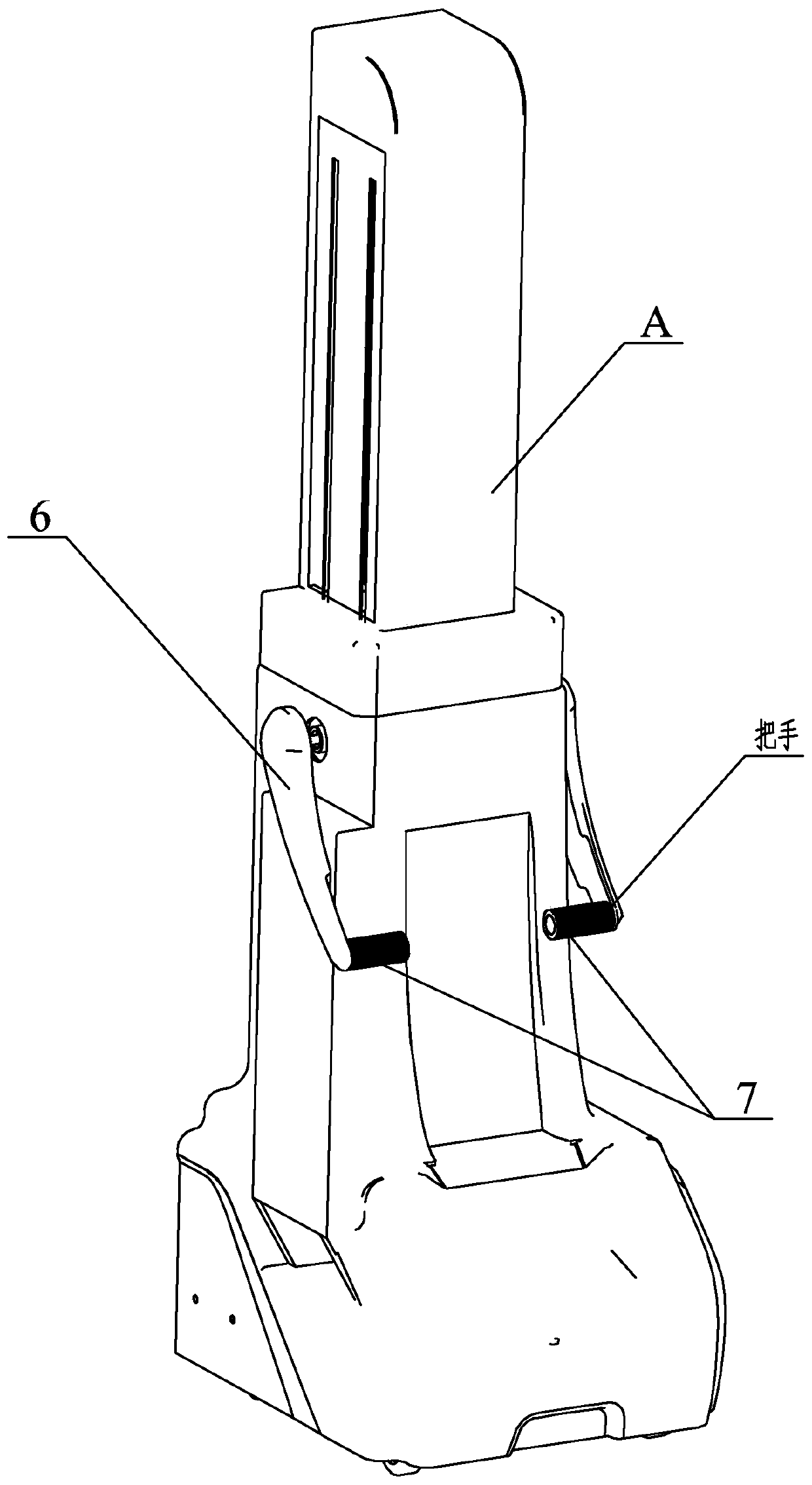
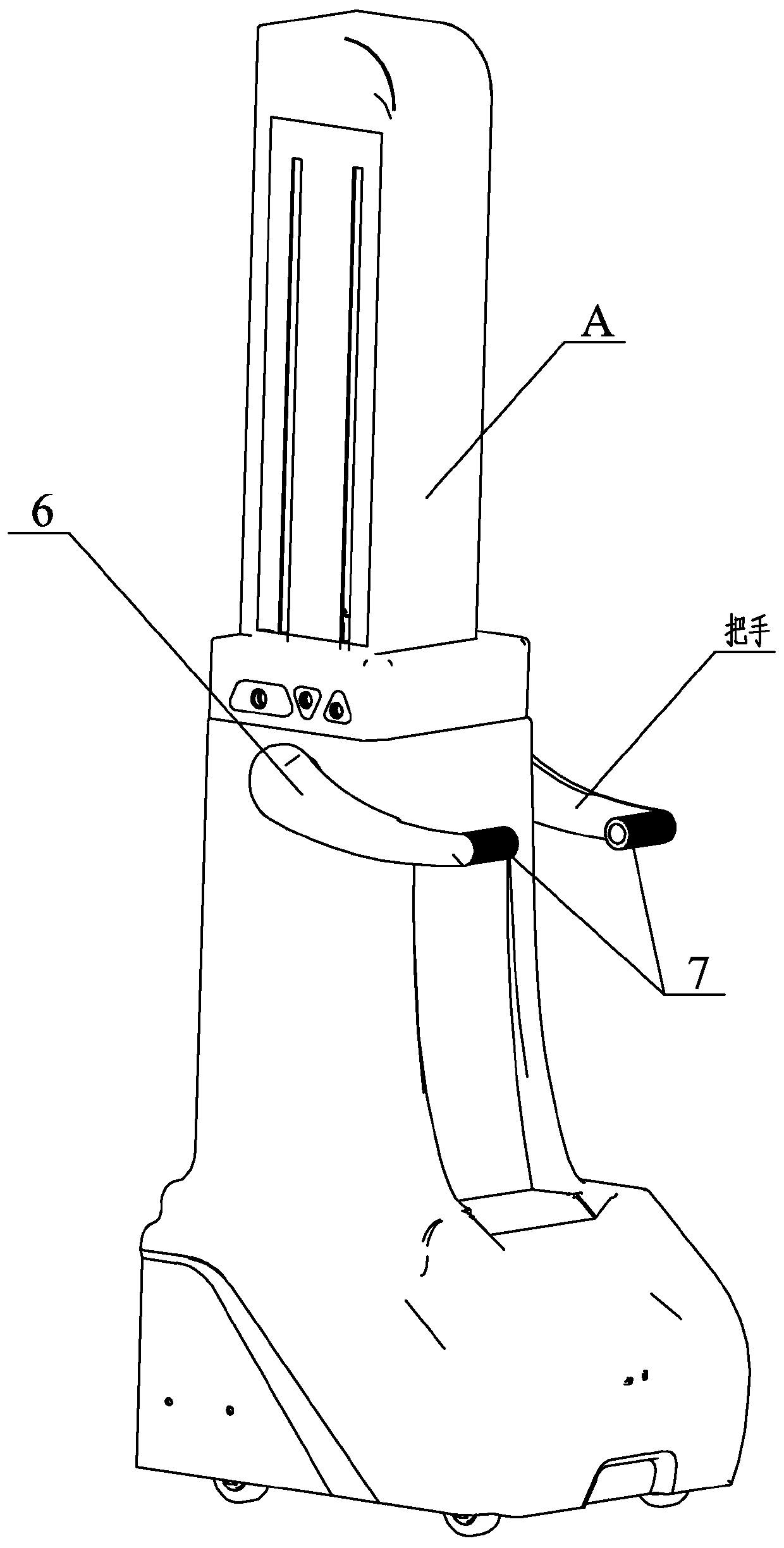
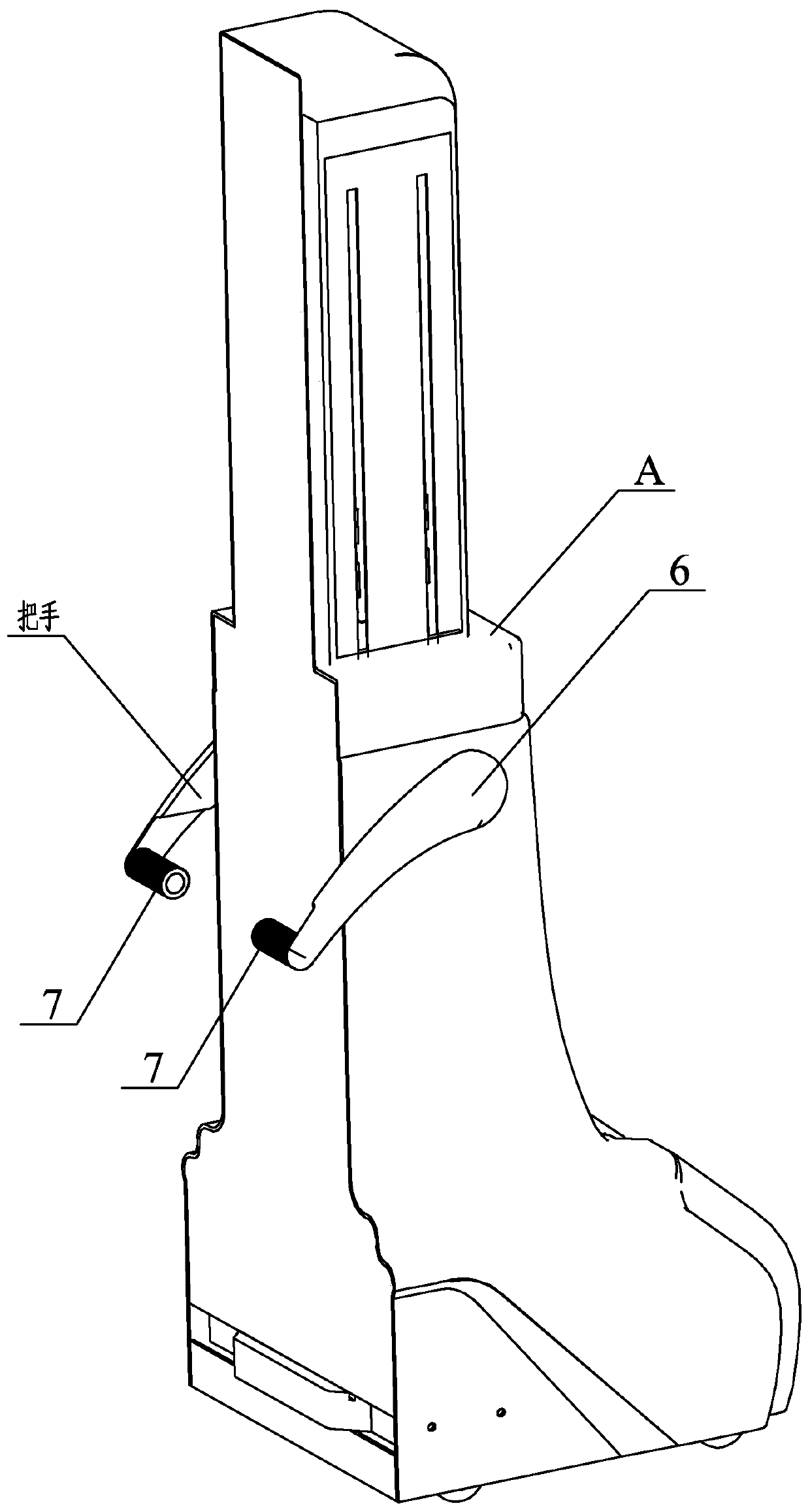
[0027] Specific implementation mode one: combine Figure 1 to Figure 9 Describe this embodiment. A handle for a surgical robot mobile trolley in this embodiment includes a handle fixture 1, a handle shaft 2, a limit assembly, a handle 6, and a handle 7. The handle fixture 1 is embedded and installed on the surgical robot. On the mobile trolley A, the limit assembly is installed on the handle shaft 2. The handle fixing part 1 realizes three states of standby, forward push and backward push by plugging and unplugging at different positions on the handle shaft 2. One end of the handle 6 It is connected with the handle fixing part 1, and the other end of the handle 6 is connected with the handle 7.
specific Embodiment approach 2
[0028] Specific implementation mode two: combination Figure 4 To illustrate this embodiment, the handle fixing part 1 of this embodiment includes a disc base 1-1 and a position adjustment sleeve 1-2, and the position adjustment sleeve 1-2 is arranged on the disc base 1-1 and integrated; Wherein, the inner side wall of the position adjustment sleeve 1-2 is provided with a boss 1-3 near the side of the disc base 1-1, and the inner side wall of the position adjustment sleeve 1-2 is provided with a protrusion 1-4. A circular groove 1-5 is provided on the inner side wall of the adjustment sleeve 1-2. With such arrangement, the disc base 1-1 is connected with the inside of the mobile trolley A, which can effectively save the space occupied by the handle. In addition, the position adjustment sleeve 1-2 is convenient for plugging and matching with the structure of the handle shaft 2 . Other compositions and connections are the same as in the first embodiment.
[0029] The handle f...
specific Embodiment approach 3
[0030] Specific implementation mode three: combination Figure 5 to Figure 7 To illustrate this embodiment, the handle shaft 2 of this embodiment includes an insertion shaft 2-1, a connection plate 2-2, a limit post 2-3 and a positioning protrusion 2-4, and the limit post 2-3 is vertically arranged on On the connection plate 2-2, the insertion shaft 2-1 is vertically arranged on the limit post 2-3, and the axes of the insertion shaft 2-1 and the limit post 2-3 are the same, and the positioning protrusion 2-4 is installed In the middle of the end face on the other side of the connection plate 2-2. With such arrangement, the structure on the limiting post 2-3 can be effectively connected with the limiting component, and can cooperate with the handle fixing part 1 when plugging and unplugging. Other compositions and connections are the same as those in Embodiment 1 or Embodiment 2.
[0031] Three through holes 2-5 are provided on the connecting plate 2-2 of the handle shaft 2 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More