

Visual SLAM method based on point-line fusion
A visual, point-and-line technology, applied in image data processing, instrumentation, 3D modeling, etc., can solve problems such as poor performance, and achieve the effects of good continuity, improved pose accuracy, and improved extraction speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings.
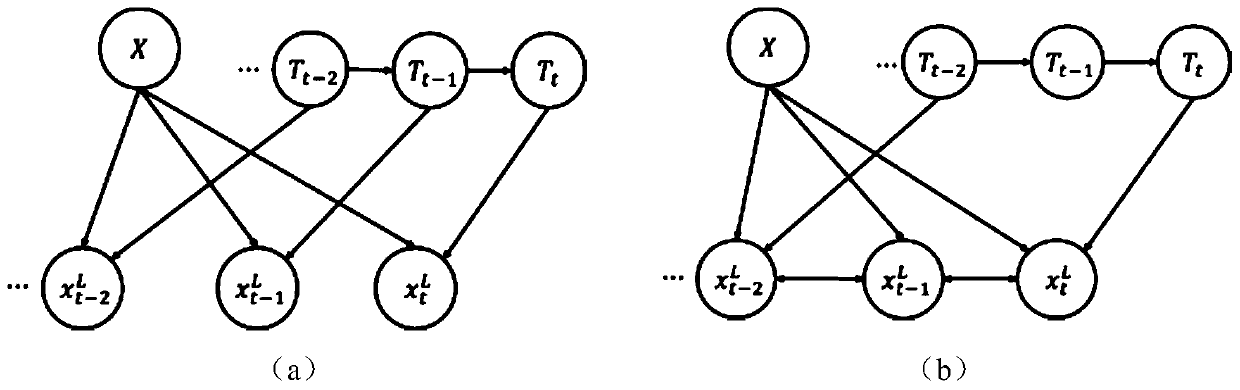
[0027] We set a 3D landmark as X, and the camera captures t+1 images at 0,1,...,t-2,t-1,t, then the latest three frames of images, the corresponding camera pose can be expressed as T t-2 , T t-1 , T t , the feature point corresponding to the 3D landmark X is x t-2 ,x t-1 ,x t . Then, the mathematical model of the general visual SLAM problem is as follows figure 2 As shown in (a), the Bayesian probability is expressed as P(x t | T t ,X). However, the mathematical problem modeled by the present invention increases the representation of the temporal relationship between frames, such as figure 2 As shown in (b), the Bayesian probability of its characteristic observation model is expressed as P(x t | T t ,X,x t-1 ).
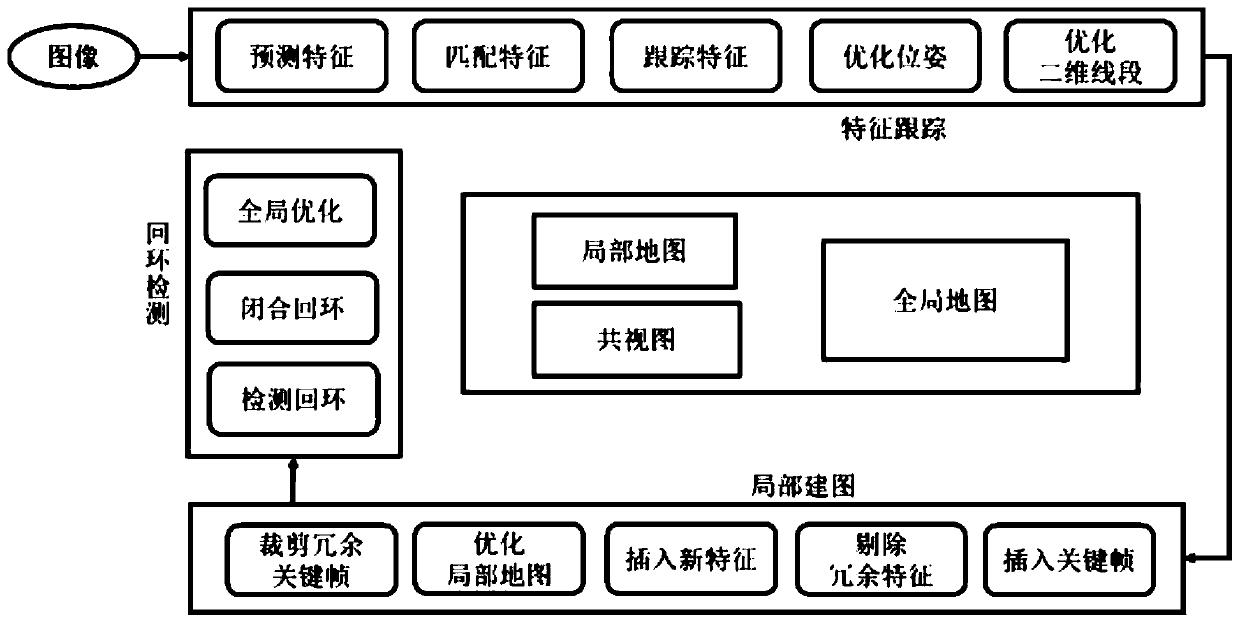
[0028] The present invention determines the following calculation process based on the mathematical model. The calculation process of the who...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More