Manipulator capable of controlling clamping force and measuring distance between clamping points
A gripping point and gripping force technology, applied in the field of manipulators that control the gripping force and measure the spacing between gripping points, and can solve problems such as lack of manipulators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] Below in conjunction with accompanying drawing this design is described further.
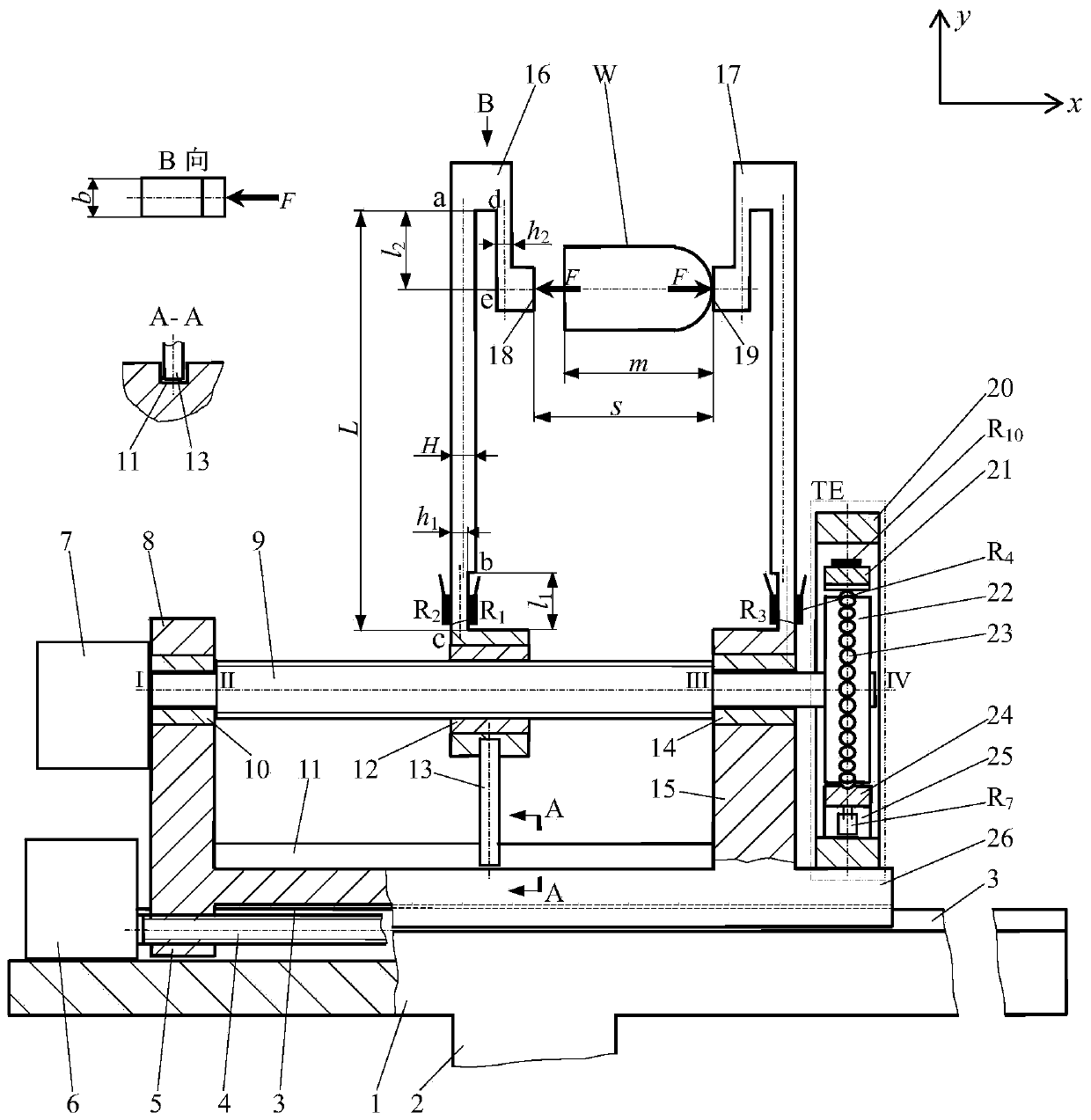
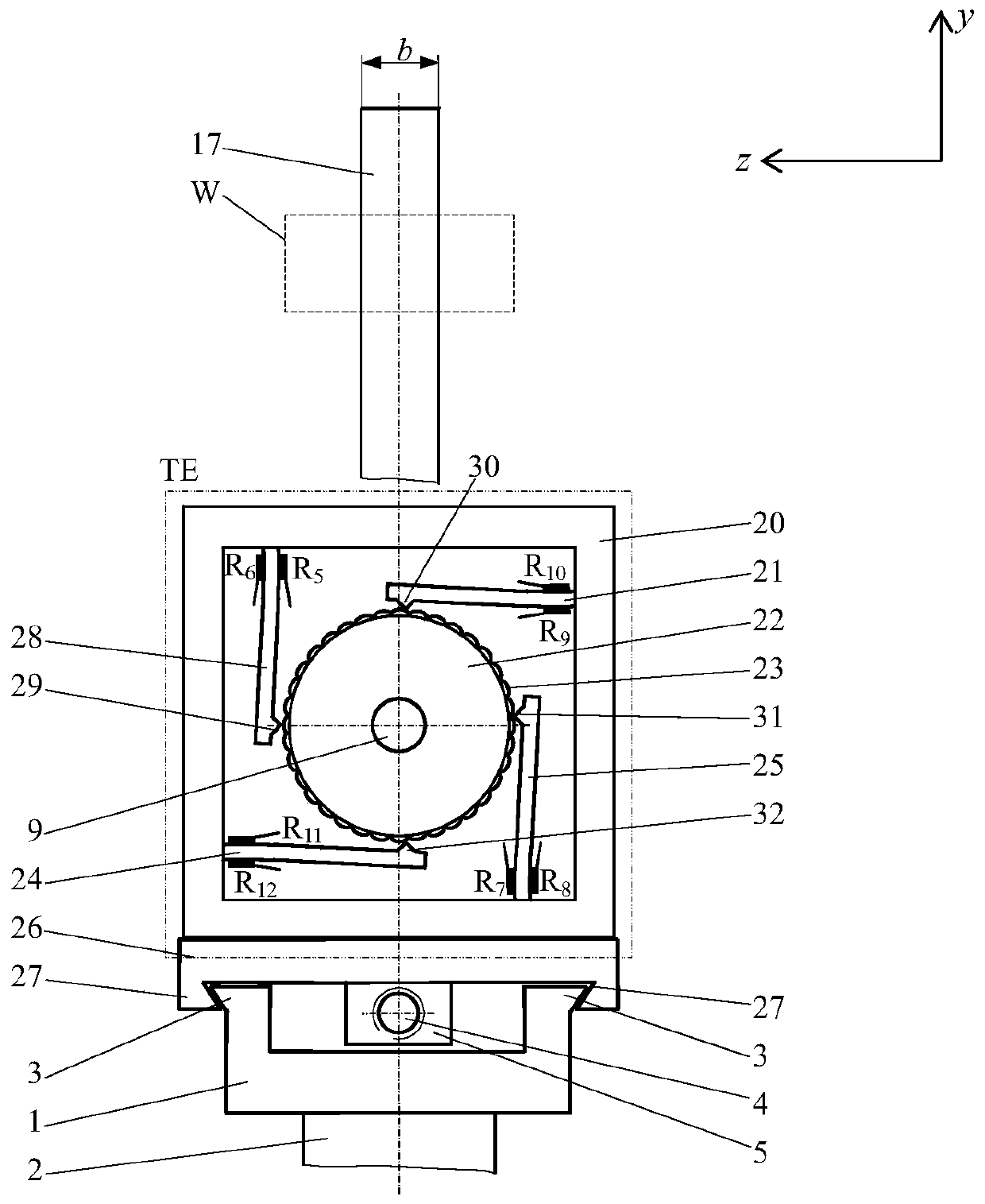
[0072] refer to Figure 1-Figure 6 , this design is a manipulator that controls the clamping force and measures the distance between clamping points. This manipulator is made up of guide rail seat 1, sliding frame 26, power transmission shaft 4, coding screw mandrel, driver, clamping arm and numerical control device.
[0073] The structure of the guide rail seat 1 includes a rectangular thick base plate, a coupling 2 and parallel male guide rails 3 . Coupling 2 is fixed under the thick base plate and is used to connect the arm of the robot. The parallel male guide rails 3 are located on the front and rear sides of the upper surface of the thick substrate.
[0074] The structure of the sliding frame 26 includes a rectangular bottom plate, parallel female guide rails 27 positioned at the front and rear edges of the bottom bottom plate, a protrusion 5 with a threaded through hole position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com