

Four-channel teleoperation force feedback control method under hysteresis non-linearity limitation
A control method and nonlinear technology, applied in general control systems, adaptive control, control/regulation systems, etc., and can solve problems such as slow estimation speed, limited estimation ability, and inaccurate position tracking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0095] Below in conjunction with embodiment the present invention is described in further detail:
[0096] The principles and features of the present invention will be further explained below in conjunction with the accompanying drawings. The following examples are only used to explain the present invention, but not to limit the scope of the present invention.
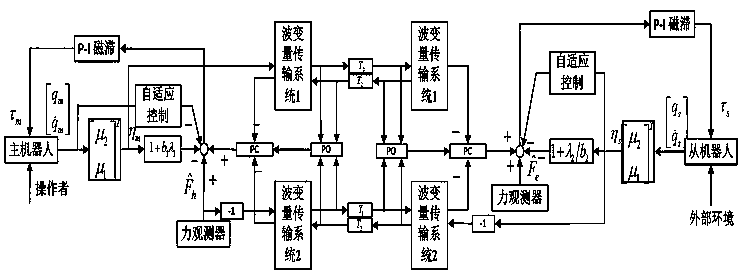
[0097] Such as Figure 1 to Figure 4 As shown, a four-channel teleoperation force feedback control method under the limitation of hysteresis nonlinearity, where figure 1 Shown is the structural frame diagram of the bilateral teleoperation system described in the present invention, which describes a complete teleoperation system, which is mainly composed of five parts: operator, master robot, information transmission channel, slave robot and working environment . Among them, the master robot and the slave robot are connected through the network transmission channel, the master robot transmits information such as its o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More