

Natural man-machine interaction method for non-contact force feedback
A human-computer interaction and force feedback technology, applied in the field of robotics, can solve problems such as limited operation accuracy, failure of human-computer interaction, and lack of force feedback.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
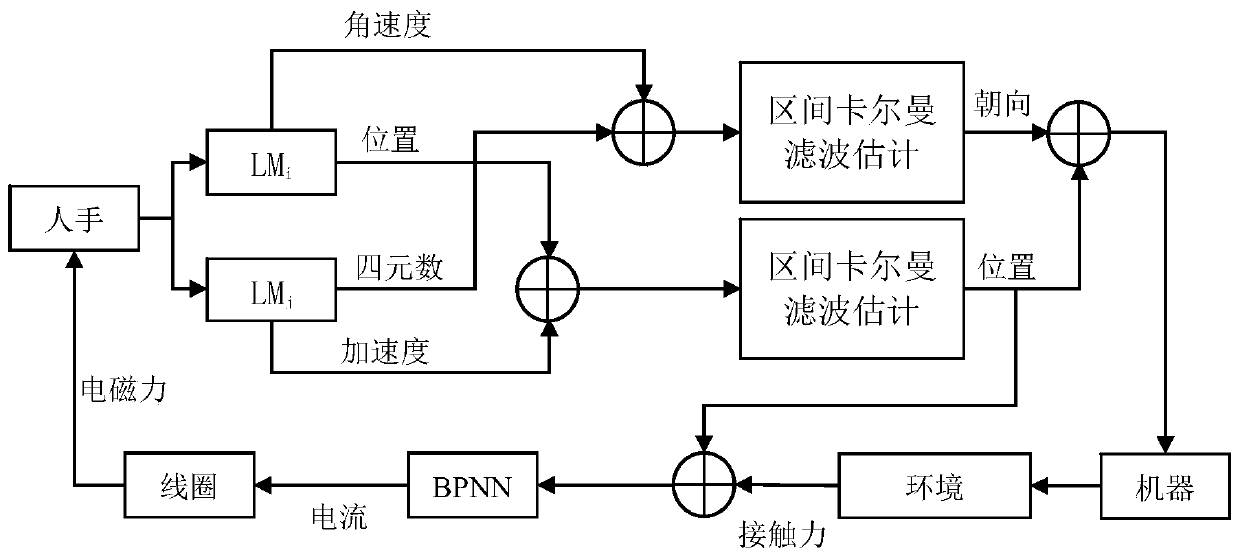
[0065] Natural human-computer interaction methods for non-contact force feedback, such as figure 1 shown, including the following steps:
[0066] S1. Use the motion sensor to measure the human hand and perform coordinate registration, including:
[0067] S1.1. Place a plurality of motion sensors on the operating platform. In this embodiment, the motion sensor uses a LeapMotion motion sensor. The LM in the figure is Leap Motion. One of the motion sensors is placed in the center of the platform, and the surrounding motion sensors The motion sensor is placed towards the center of the operating platform at an inclination angle of 45 degrees, so that the bottom operating space can be enlarged; the coordinate system of the motion sensor itself is defined as X L Y L Z L ;The origin of the motion sensor coordinate system is its geometric center; the three coordinate axes of the motion sensor are defined as follows: X L The positive direction is along the longer side of the device ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More