

Accurate positioning system and accurate positioning navigation system based on two fixed reference points
A precise positioning and navigation system technology, applied in navigation, positioning, mapping and navigation, etc., can solve problems such as the inability to locate the target to be measured and the unsolved equation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
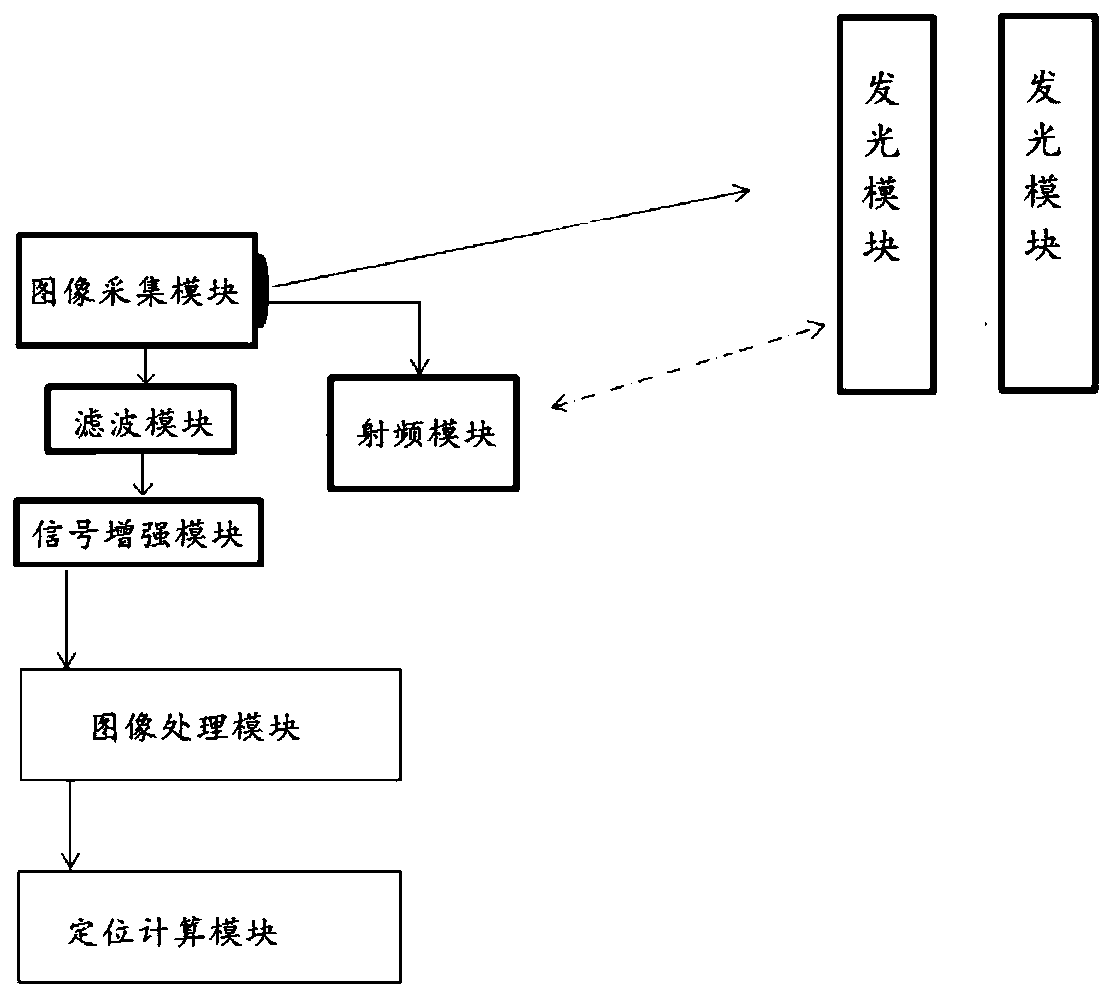
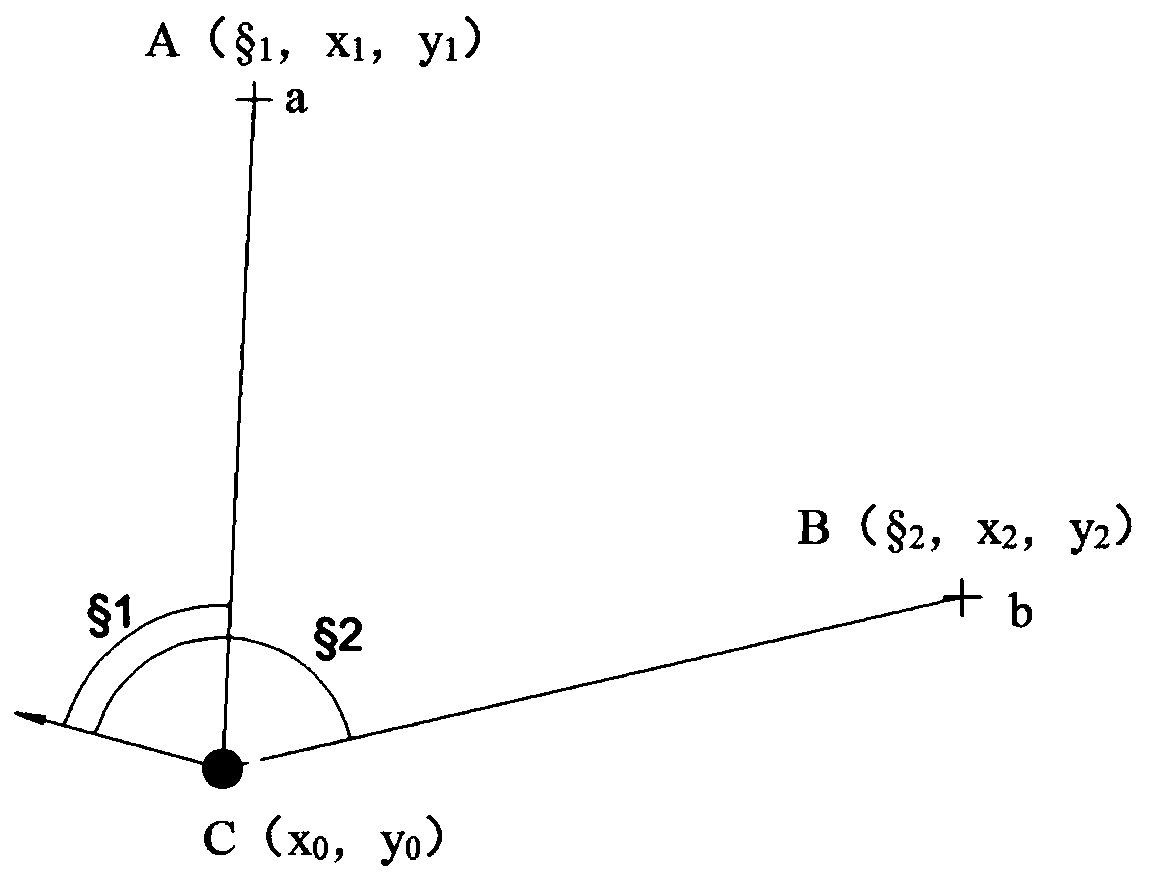
[0039] Such as Figure 2~3 As shown, the embodiment of the present invention proposes a precise positioning system based on two fixed reference points, including: two light-emitting modules, and the two light-emitting points emitted by them are used as fixed reference points; images of fixed reference points; the image processing module is used to process the collected images and extract the positioning information A of two fixed reference points(§ 1 , x 1 ,y 1 ), B(§ 2 , x 2 ,y 2 ),in§ 1 To fix the angle formed by the connection line between the reference point a and the image processing module and the shooting direction of the image processing module,§ 2 Be the angle formed by the connection line between the fixed reference point b and the image processing module and the shooting direction of the image processing module, (x 1 ,y 1 ) is the coordinates of a fixed reference point a, (x 2 ,y 2 ) is the coordinates of fixed reference point b; the positioning calculatio...
Embodiment 2
[0047] Such as Figure 4 As shown, the present invention also proposes a precise positioning and navigation system based on two fixed reference points, including: the above-mentioned positioning system, and also includes: a map module, which is used to 0,y 0 ) and the location information of the target location, plan the walking route and display it on the map; the walking module is used to install the image acquisition module, and reach the target location according to the walking route of the map module.
[0048] Preferably, the system further includes: an obstacle avoidance module, used to detect obstacle information of the walking module, and send the obstacle information to the map module, the map module replans the walking route according to the obstacle information, and the walking module replans the The walking route reaches the target location. In this embodiment, an obstacle avoidance module is added to realize automatic driving of the walking module.
[0049] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More