

Inspection robot instrument image recognition method and system based on computer vision
An inspection robot and computer vision technology, applied in the field of instrument image recognition, can solve the problems of instrument image recognition methods such as unstable parameters, difficult adjustment, unsafe human inspection, etc., so as to reduce the complexity and the required work The effect of increasing the amount, improving accuracy and speed, and avoiding a lot of tuning work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
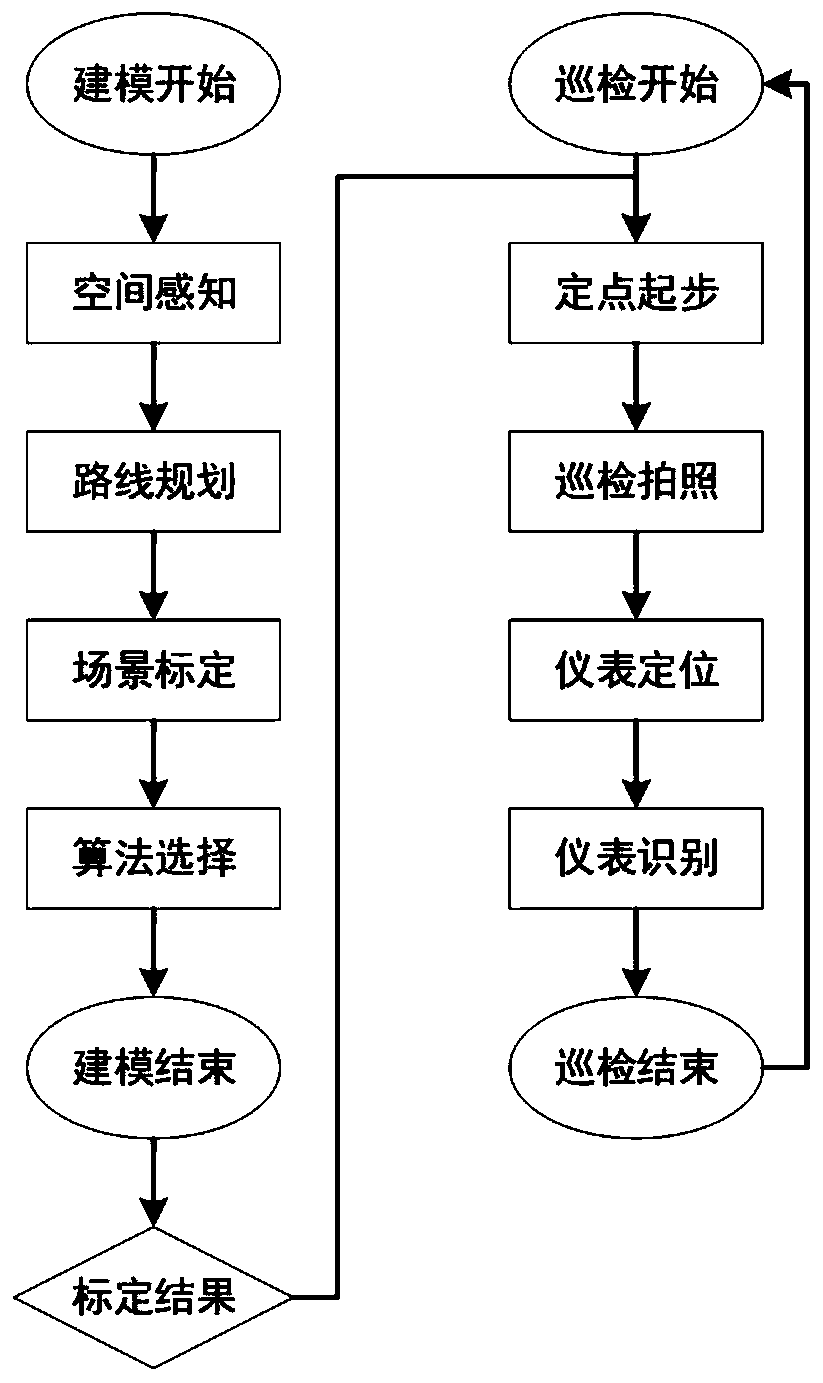
[0057] Such as figure 1 As shown, Embodiment 1 of the present disclosure provides a computer vision-based inspection robot meter image recognition method. The application module of this method mainly includes two parts, namely a scene modeling module and an actual use module.
[0058] The scene modeling module needs to use manpower to draw the cloud image of the specific scene and formulate the inspection points, and at the same time, it needs to record the calibration information required by the corresponding algorithm at each inspection point.
[0059] The inspection module is based on the scene modeling module. Based on the inspection location and calibration information set in the scene modeling stage, the captured pictures are processed by the algorithm module to obtain the final instrument reading.
[0060] The following is a detailed description of the overall application process of this method. The first is the scene modeling stage:
[0061] Step (1): Carry out 3D mod...
Embodiment 2
[0094] Embodiment 2 of the present disclosure provides a computer vision-based inspection robot instrument image recognition system, including a main control module and at least one inspection robot, the main control module has a built-in three-dimensional space model of the scene to be inspected, preset The inspection route of the inspection robot, the preset photo point, and the model, range, meter template picture and photo point number of the specified meter;
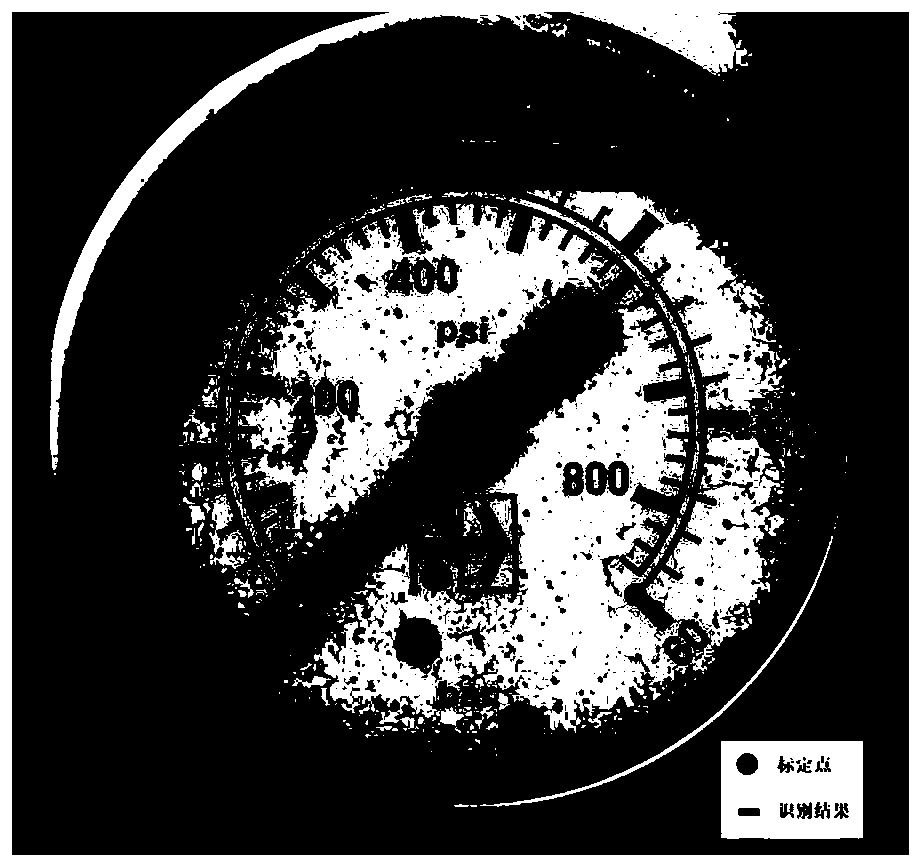
[0095] The inspection robot communicates with the main control module or the main control module is embedded in the inspection robot, and the inspection robot arrives at each inspection point along the inspection route in accordance with the specified sequence of numbers, and the meter is scanned according to the preset photographing point. Take pictures, encode the photos of the meters obtained, and then locate the meters according to the template matching algorithm, and then use the corresponding meter recognition ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More